

[置顶] 泰晓 RISC-V 实验箱,配套 30+ 讲嵌入式 Linux 系统开发公开课
QEMU 启动方式分析(4): OpenSBI 固件分析与 SBI 规范的 HSM 扩展
Corrector: TinyCorrect v0.1 - [pangu epw] Author: YJMSTR pyjmstr@gmail.com Date: 2022/10/05 Revisor: Bin Meng, Falcon Project: RISC-V Linux 内核剖析 Environment: Ubuntu22.04 LTS Sponsor: PLCT Lab, ISCAS
前言
在 上一篇文章 中,我们结合 QEMU 代码分析了 QEMU RISC-V ‘virt’ 机器是如何从 ZSBL 阶段跳转到下一阶段,其中有 OpenSBI firmware 的加载和传递。本文将进一步分析 OpenSBI 各类固件的不同,以及 SBI 规范的 HSM 扩展。
本文使用的软件版本如下:
- QEMU: v7.0.0
- OpenSBI: v1.1
RISC-V 特权架构简介
RISC-V 定义了三种特权模式:
- Machine Mode:机器模式,简称 M 模式,对应特权等级 3。这是 RISC-V 中 hart(hardware thread,硬件线程)可以执行的最高权限模式。
- Supervisor Mode:监管者模式,简称 S 模式,对应特权等级 1。这是一种可选的权限模式,它的权限比 U 模式更高,但是比 M 模式低。S 模式下运行的软件不能使用 M 模式的 CSR(Control and State Register,控制和状态寄存器) 和 M 模式下的指令,并且受到 PMP(Physical Memory Protection,物理内存保护)的限制,只能访问 M 模式指定该模式可访问的内存地址。
- User Mode:用户模式,简称 U 模式,对应特权等级 0。与 S 模式一样,该模式下的程序不能执行更高特权等级的指令和访问 CSR,并且同样受到 PMP 的限制。
此外还定义了保留的特权等级 2,在 H 扩展中会将 S 模式扩展为 HS 模式(Hypervisor-Extended Supervisor mode)。
RISC-V 启动路径上的各个部分运行在不同的模式下:ROM,Loader 和 Runtime 运行在 M 模式,Bootloader 和通用 OS(例如 Linux)运行在 S 模式,而启动通用 OS 后运行的软件位于 U 模式,硬件可以根据需求实现不同的特权模式组合。如下表所示:
| 实现的特权等级数 | 支持的模式 | 预期用途 |
|---|---|---|
| 1 | M | 简单嵌入式系统 |
| 2 | M,U | 安全嵌入式系统 |
| 3 | M,S,U | 运行类 Unix 操作系统的系统 |
SBI 与 OpenSBI
SBI 指 Supervisor Binary Interface,监管者二进制接口,它由一个小核心模块和一组可选的扩展模块构成:
- 平台特定的运行在 M 模式的固件和 S 或 HS 模式下的引导加载器、管理程序或通用操作系统之间的接口。
- 运行在 HS 模式的监管者程序和运行在 VS 模式下的引导加载器、通用操作系统之间的接口。
SBI 提供了一系列接口,以支持在 S 模式下通过 ecall 指令执行一些需要更高权限的操作。有关 SBI 的更详细介绍可以参考 官方文档。
OpenSBI 是由西数公司开发的 SBI 实现,旨在为上述情况 1 提供 RISC-V SBI 的一个可参考的开源实现,其可以被扩展以适应特定的硬件配置。OpenSBI 运行在 M 模式,因为其固件需要直接访问硬件。
有关 OpenSBI 的更具体介绍可以参考其 官方文档。而 OpenSBI 的上手流程可以参考泰晓科技社区 之前的文章。
OpenSBI 固件
OpenSBI 为不同的平台提供了不同的固件,用于处理不同平台间早期引导阶段的差异。所有的固件都会执行相同的平台硬件初始化过程,而它们之间的区别在于早期引导阶段传递参数的方式,以及如何执行下一引导阶段。
上一引导阶段将会通过 RISC-V CPU 的如下寄存器传递信息:
- 通过 a0 寄存器传递硬件线程 id (mhartid)
- 通过 a1 寄存器传递设备树文件(device tree blob)在内存中的地址,该地址必须按 8 字节对齐。
OpenSBI 目前支持三种类型的固件,分别是:
- FW_PAYLOAD
- FW_JUMP
- FW_DYNAMIC
以上类型的固件全都可以在编译时可以在 make 命令行或平台的 config.mk 配置文件来配置如下选项:
- FW_TEXT_ADDR:必选参数,用于指定 OpenSBI 固件的执行地址。
- FW_FDT_PATH:要嵌入到固件的
.rodata字段的外部扁平设备树的地址。如果没有提供这一选项,固件会认为 FDT 地址将由上一引导阶段通过参数传递进来。 - FW_FDT_PADDING:可选参数,对 FW_FDT_PATH 选项指定的 FDT 二进制文件进行零字节填充。
- FW_PIC:当 FW_PIC=y 时,将生成位置无关的固件映像。此时 OpenSBI 将在其被加载的地址上直接运行。这一选项要求支持 PIE 的工具链,且该选项是默认开启的。
其中,FW_PIC 选项的默认开启导致了 QEMU ‘virt’ 平台下使用 U-Boot SPL 与 OpenSBI 无法正确加载 Linux Kernel,目前 Bin Meng 老师已向官方社区提交 patch。
FW_PAYLOAD
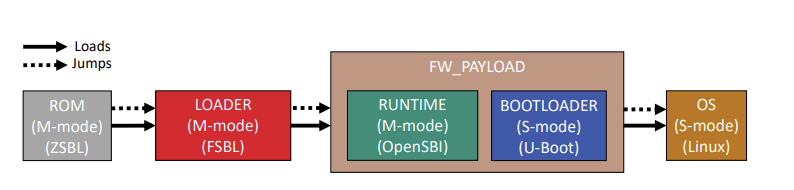
该类型的固件直接包含了下一引导阶段的二进制代码,被包含的代码称为 “payload”。payload 通常是 bootloader 或操作系统内核。这种固件允许用户重写设备树文件(DTB)。当上一引导阶段没有传递扁平设备树文件(FDT 文件)时,它可以在最终固件的 .rodata 字段中嵌入 FDT。
FW_PAYLOAD 类型的固件在编译时可以通过 make 命令或 config.mk 配置如下参数:
- FW_PAYLOAD_OFFSET:payload 在最终的 FW_PAYLOAD 二进制映像文件中的地址与 FW_TEXT_BASE 的偏移值。当 FW_PAYLOAD_ALIGN 参数未定义时,该参数是必须的。
- FW_PAYLOAD_ALIGN:地址对齐约束。payload 会在最终的 FW_PAYLOAD 二进制映像文件中,被链接到固件二进制代码的末尾。如果同时指定了 FW_PAYLOAD_ALIGN 参数和 FW_PAYLOAD_OFFSET 参数,FW_PAYLOAD_ALIGN 参数将被忽略。
- FW_PAYLOAD_PATH:下一阶段二进制映像文件的路径。如果没有指定这一参数,OpenSBI 将自动提供一个用于测试的简单 payload,该 payload 将在平台终端中打印一条信息后执行
while(1)死循环。 - FW_PAYLOAD_FDT_ADDR:可以是上一引导阶段传递过来的扁平设备树(FDT)的地址,也可以由 FW_FDT_PATH 参数指定并要嵌入到
.rodata字段的扁平设备树(FDT)在下一引导阶段之前的地址。
在 QEMU RISC-V ‘virt’ 平台上使用时,若要引导除 OpenSBI 提供的测试用 payload 之外的其它 payload,需要在编译 OpenSBI 时通过 make 命令行的 FW_PAYLOAD_PATH 选项指定 payload 的路径,以 U-Boot 为例:
$ export CROSS_COMPILE=riscv64-linux-gnu-
$ make PLATFORM=generic FW_PAYLOAD_PATH=<uboot_build_directory>/u-boot.bin
随后通过 QEMU 的 -bios 选项指定编译出的 fw_payload.elf 或 fw_payload.bin 文件路径即可。
FW_JUMP
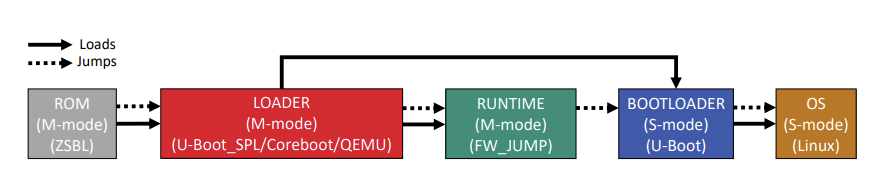
该类型的固件会跳转到给定的地址。与 fw_payload 不同的是,其不包含下一引导阶段的二进制代码。该类型固件曾经是 QEMU RISC-V ‘virt’ 平台的默认固件。
FW_JUMP 类型的固件在编译时可以通过 make 命令或 config.mk 文件配置如下特有的选项:
- FW_JUMP_ADDR:在 OpenSBI 固件之后执行的下一引导阶段的入口地址。这一地址一般与下一引导阶段被加载到的地址一致。这是一个必选的参数。
- FW_JUMP_FDT_ADDR:上一引导阶段传递过来的扁平设备树(FDT)在执行下一引导阶段前要被放在内存中的位置。如果没有提供这个参数,OpenSBI 固件将会直接把 FDT 当前的地址传递给下一引导阶段。
在 QEMU RISC-V ‘virt’ 平台上使用时,需要先在 QEMU 启动命令中通过 -bios 选项指定 FW_JUMP 类型的固件,并通过 -kernel 选项指定要加载的 bootloader 或操作系统内核。以 U-Boot 为例,使用如下命令启动 QEMU:
$ qemu-system-riscv64 -M virt -nographic \
-bios <opensbi_build_directory>/build/platform/generic/firmware/fw_jump.bin \
-kernel <uboot_build_directory>/u-boot.bin
此外,还需要确保 FW_JUMP_FDT_ADDR 设定的地址足够高,以免覆盖了内核在内存中的位置。
FW_DYNAMIC
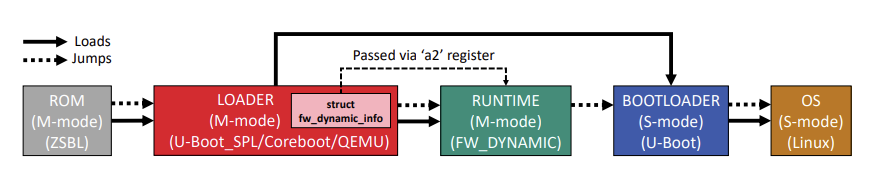
该类型的固件会在 Runtime 阶段从上一引导阶段获得下一引导阶段的入口,下一阶段通常是 Bootloader 或操作系统内核。目前,此类固件是 QEMU 的默认固件。
在 上一篇文章 中我们已经知道,RISC-V ‘virt’ 平台在上一引导阶段创建 struct fw_dynamic_info 这一结构体,并将其在内存中的地址通过 RISC-V CPU 的 a2 寄存器传递给 FW_DYNAMIC。由于该类型固件所需的信息能够通过这一结构体传递,其并没有特有的编译时配置选项。struct fw_dynamic_info 如下所示:
/** Representation dynamic info passed by previous booting stage */
struct fw_dynamic_info {
/** Info magic */
target_long magic;
/** Info version */
target_long version;
/** Next booting stage address */
target_long next_addr;
/** Next booting stage mode */
target_long next_mode;
/** Options for OpenSBI library */
target_long options;
/**
* Preferred boot HART id
*
* It is possible that the previous booting stage uses same link
* address as the FW_DYNAMIC firmware. In this case, the relocation
* lottery mechanism can potentially overwrite the previous booting
* stage while other HARTs are still running in the previous booting
* stage leading to boot-time crash. To avoid this boot-time crash,
* the previous booting stage can specify last HART that will jump
* to the FW_DYNAMIC firmware as the preferred boot HART.
*
* To avoid specifying a preferred boot HART, the previous booting
* stage can set it to -1UL which will force the FW_DYNAMIC firmware
* to use the relocation lottery mechanism.
*/
target_long boot_hart;
};
可以看到,其中显式指定了下一引导阶段的地址与模式,以及 OpenSBI 选项等信息。并且该结构体含有版本信息,以便于向后兼容。
在 QEMU RISC-V ‘virt’ 平台上,若用户没有指定 QEMU 的 -bios 参数,QEMU 将会自动加载其自带的 FW_DYNAMIC 类型固件。32 位平台和 64 位平台下的 QEMU 默认固件分别是 opensbi-riscv32-generic-fw_dynamic.bin 与 opensbi-riscv64-generic-fw_dynamic.bin。
此外,在 QEMU RISC-V ‘virt’ 上运行 U-Boot SPL 时,U-Boot 本体和 OpenSBI 的 FW_DYNAMIC 固件会被绑定为 FIT 映像(Flattened Image Tree,扁平映像树)以供 U-Boot SPL 使用,需要在编译时指定 OPENSBI 环境变量为编译出的 FW_DYNAMIC 固件的路径,或是将该固件复制到 U-Boot 目录下。
比较与分析
FW_PAYLOAD 类型的固件将下一阶段的二进制文件和固件进行打包,适用于上一引导阶段无法同时加载 OpenSBI 和 Runtime 的下一引导阶段的情况。
FW_JUMP 类型的固件能够跳转到下一阶段的入口,但是需要在编译 FW_JUMP 类型的固件时知晓下一引导阶段(U-Boot,内核和 FDT)要加载到什么地址,其适用于上一引导阶段能够同时加载 Runtime 的下一引导阶段和 OpenSBI 固件的情况。
FW_DYNAMIC 类型的固件能够从上一引导阶段获得 Runtime 的下一引导阶段的入口。其与 FW_JUMP 类型固件一样,适用于上一引导阶段能够加载 OpenSBI 固件和 Runtime 的下一引导阶段的情况,但不需要在编译固件时指定下一引导阶段的入口地址。与此同时,其通过
struct fw_dynamic_info结构体向 fw_base 提供信息。
QEMU RISC-V ‘virt’ 平台先前使用 OpenSBI 的 FW_JUMP 固件作为默认固件,其在编译时需要指定后续阶段(FDT 和内核映像)的地址,这使得内核映像的大小受到 FDT 地址和内存大小的限制。
现在上述平台已将默认的 OpenSBI 固件更换为了 FW_DYNAMIC。相比于 FW_JUMP,FW_DYNAMIC 类型的固件允许由 loader 指定下一引导阶段的地址,并且可以向后续引导阶段传递信息。对于 U-Boot 来说,是 SPL 通过 FIT 里的信息填好下一阶段的信息。
引入对 FW_DYNAMIC 类型固件的支持还不会打破对另外两种固件的支持,因为另外两种固件并不通过 a2 寄存器传递信息。
SBI 的 HSM 扩展
HSM 是指 Hart State Management Extension,硬件线程(hart)状态管理扩展。它引入了一组 hart 状态和一组 S 模式软件用于获取和改变 hart 状态的函数。
OpenSBI 曾经强制选择 hart0 进行重定位和早期的初始化工作。在 v0.6 版本中引入了彩票机制(lottery mechanism)。彩票机制会随机选择一个 hart 作为冷启动 hart (coldboot hart),这个 hart 也被称为 boot/main hart。它负责进行每个 hart 的暂存空间 (scratch space) 的初始化并将 OpenSBI 重定位到其链接地址,其它的 hart 被称为热启动 hart(warmboot hart)。
在 U-Boot SPL 中,有一个 main hart 负责让所有其它 harts (secondary harts)先跳转到 OpenSBI,它自己最后跳转。这使得彩票机制总是会选择 secondary harts 中的一个。若 U-Boot SPL 和 OpenSBI 的链接地址范围有重叠,彩票机制可能会在其它 hart 仍运行在上一引导阶段时进行重定位,覆盖其它 hart 的数据,从而导致启动时崩溃(boot-time crash)。
SBI 的 HSM 扩展允许 S 模式软件按照定义好的顺序启动 harts,而不像之前一样只能按随机顺序启动 harts,这使得 S 模式能够支持更多的 CPU 功能。譬如现在在 struct fw_dynamic_info 结构体中可以指定选择哪一个 hart 作为 boot hart (即上文提到的 main hart),并让 boot hart 最后一个跳转到下一引导阶段,从而避免启动时崩溃。
这里与其它体系架构的多核引导流程做个简单对比:以 ARM 为例,Bootloader 会判断当前是否为 CPU0,如果不是,则会执行 wfe 指令进行等待,否则继续进行初始化操作。ARM 的多核启动一般有自旋表(spin-table)和电源状态协作接口(power state coordination interface,PSCI) 两种实现方式。自旋表仅能实现 CPU0 之外的处理器的启动,而 PSCI 与 RISC-V 中的 SBI HSM 类似, 能够实现处理器核的热拔插,挂起等功能。
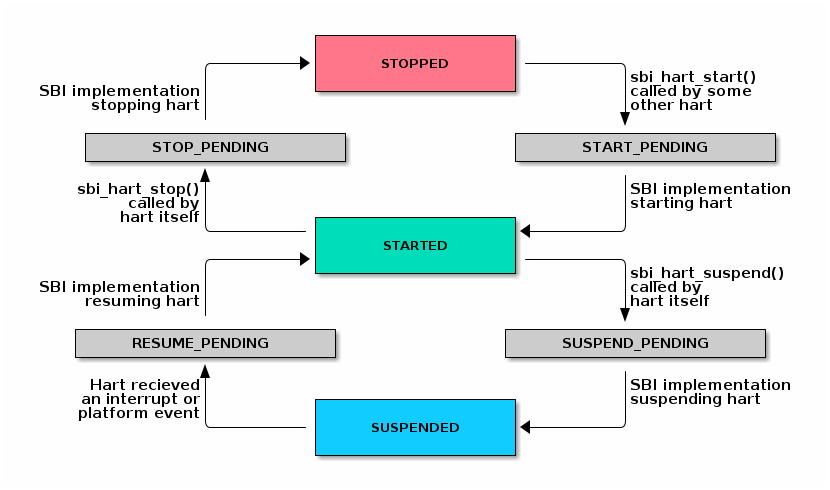
接着分析 HSM 扩展,所有可能的 hart 状态如下表所示:
| 状态 ID | 状态名 | 描述 |
|---|---|---|
| 0 | STARTED | hart 被物理启动且正常运行 |
| 1 | STOPPED | hart 没有在 S 模式或任何更低的特权模式下执行。如果平台有能够关闭 hart 的机制,这可能是因为它被 SBI 的实例关闭了 |
| 2 | START_PENDING | 其它 hart 要求从 STOPPED 状态继续或启动这个 hart,SBI 实例正在尝试让该 hart 进入 STARTED 状态 |
| 3 | STOP_PENDING | 该 hart 要求将自己从 STARTED 状态停止或关闭,SBI 实例正在尝试让该 hart 进入 STOPPED 状态 |
| 4 | SUSPENDED | 该 hart 处于平台特定的挂起(或低功耗)状态 |
| 5 | SUSPEND_PENDING | 该 hart 要求让自己从 STARTED 状态进入平台特定的低功耗状态,SBI 实例正在尝试让其进入平台特定的 SUSPENDED 状态 |
| 6 | RESUME_PENDING | 中断或平台特定的硬件事件导致 hart 从 SUSPENDED 状态转为正常执行,SBI 实例正在尝试将该 hart 转为 STARTED 状态 |
任何时刻 hart 的状态只可能是上表中的某一种。SBI 实现的 hart 状态转移需要遵循以下的状态机:
SBI HSM 函数
SBI 规范中给出了如下四个函数用于获取和改变 hart 的状态:
HART start
struct sbiret sbi_hart_start(unsigned long hartid,
unsigned long start_addr,
unsigned long opaque)
在 start_addr 处以 S 模式执行 hartid 所指定的 hart,并在开始执行时将 opaque 存入 a1 寄存器。其中 opaque 是一个 XLEN 位的值,XLEN 指机器位数。
HART stop
struct sbiret sbi_hart_stop(void)
停止执行 S 模式下调用该函数的 hart,并将其所有权交还给 SBI 实现。
HART get status
struct sbiret sbi_hart_get_status(unsigned long hartid)
返回 hartid 指定的 hart 的状态。
HART suspend
struct sbiret sbi_hart_suspend(uint32_t suspend_type,
unsigned long resume_addr,
unsigned long opaque)
要求 SBI 实现将调用该函数的 hart 置于 suspend_type 所指定的平台特定挂起(或低功耗)状态,resume_addr 是 hart 在挂起结束之后回到 S 模式继续执行的地址,opaque 是一个 XLEN 位的值,其会在 hart 结束挂起状态时被放入 a1 寄存器。
OpenSBI HSM 实现
在 OpenSBI 的 README.md 中,有如下介绍:
Currently, OpenSBI fully supports SBI specification v0.2. OpenSBI also supports Hart State Management (HSM) SBI extension starting from OpenSBI v0.7. HSM extension allows S-mode software to boot all the harts a defined order rather than legacy method of random booting of harts. As a result, many required features such as CPU hotplug, kexec/kdump can also be supported easily in S-mode. HSM extension in OpenSBI is implemented in a non-backward compatible manner to reduce the maintenance burden and avoid confusion. That’s why, any S-mode software using OpenSBI will not be able to boot more than 1 hart if HSM extension is not supported in S-mode.
Linux kernel already supports SBI v0.2 and HSM SBI extension starting from v5.7-rc1. If you are using an Linux kernel older than 5.7-rc1 or any other S-mode software without HSM SBI extension, you should stick to OpenSBI v0.6 to boot all the harts. For a UP systems, it doesn’t matter.
N.B. Any S-mode boot loader (i.e. U-Boot) doesn’t need to support HSM extension, as it doesn’t need to boot all the harts. The operating system should be capable enough to bring up all other non-booting harts using HSM extension.
大意是:
从 v0.7 版本开始,OpenSBI 能够提供 HSM 扩展的支持。而为了减少维护负担和避免混淆,OpenSBI 中的 HSM 扩展是以非向后兼容的方式实现的,因此当 S 模式下不支持 HSM 扩展时,所有使用 OpenSBI 的 S 模式软件不能启动超过 1 个 hart。
Linux 内核也从 v5.7-rc1 版本开始为 SBI 规范 v0.2 版本和 HSM 扩展提供支持。如果你在使用更老版本的 Linux 内核或是其它不支持 SBI 扩展的 S 模式软件,你应该继续使用 v0.6 版本的 OpenSBI 来启动所有的 harts。而对于单逻辑处理器系统来说,这无关紧要。
注:S 模式下的 Bootloader(例如 U-Boot)不需要为 HSM 扩展提供支持,因为它们不需要启动所有的 harts。操作系统需要有能力使用 HSM 扩展启动所有其它的未启动 harts。
并且,OpenSBI 自 v1.0 版本起开始支持在 RISC-V SBI 规范 v0.3 版本中引入的 HART 挂起(suspend)功能。
在 OpenSBI 的 GitHub 仓库中寻找 v0.7 版本 新增的 commit,这些 commit 为 OpenSBI 引入了 HSM 扩展,以支持 hart 的热拔插(hotplug),并提供了在 S 模式下以指定顺序启动 hart 的能力。
sbi_hsm_init()
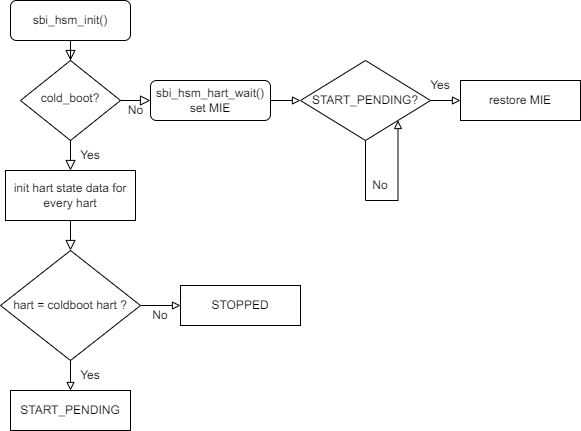
首先在 lib/sbi/sbi_hsm.c 中,OpenSBI 通过 sbi_hsm_init 函数进行 HSM 的初始化,该函数的流程图如上所示。若当前为冷启动,该函数会为每个 hart 分配一个 sbi_hsm_data 类型的结构体,并设置 hart 的初始状态,当前冷启动所使用的 hart 初始状态会被设为 START_PENDING,其它 hart 的初始状态为 STOPPED;否则调用 sbi_hsm_hart_wait 函数,通过 mie 寄存器的 MSIP 和 MEIP 位来设置中断,并通过内联汇编使用 wfi 指令进入低功耗等待状态,直到该 hart 的状态变为 START_PENDING 时恢复 mie。该部分实现如下:
if (cold_boot) {
hart_data_offset = sbi_scratch_alloc_offset(sizeof(*hdata));
if (!hart_data_offset)
return SBI_ENOMEM;
/* Initialize hart state data for every hart */
for (i = 0; i <= sbi_scratch_last_hartid(); i++) {
rscratch = sbi_hartid_to_scratch(i);
if (!rscratch)
continue;
hdata = sbi_scratch_offset_ptr(rscratch,
hart_data_offset);
ATOMIC_INIT(&hdata->state,
(i == hartid) ?
SBI_HSM_STATE_START_PENDING :
SBI_HSM_STATE_STOPPED);
}
} else {
sbi_hsm_hart_wait(scratch, hartid);
}
sbi_ecall_hsm_handler()
在 lib/sbi/sbi_ecall_hsm.c 中实现了 sbi_ecall_hsm_handler 这一函数,并且 sbi_ecall_extension 类型结构体 ecall_hsm 的 handle 函数被设为该函数。该函数根据参数传入的 funcid 来调用对应的 SBI HSM 处理函数。
在调用 ecall 指令后,lib/sbi/sbi_ecall.c 中的 sbi_ecall_handler 函数会根据 a7 寄存器的值判断要进行的操作是否属于某个 SBI 扩展,若是,则会调用该扩展对应的 sbi_ecall_extension 的 handle 函数进行处理。
sbi_ecall_hsm_handler 函数的实现如下:
static int sbi_ecall_hsm_handler(unsigned long extid, unsigned long funcid,
const struct sbi_trap_regs *regs,
unsigned long *out_val,
struct sbi_trap_info *out_trap)
{
int ret = 0;
struct sbi_scratch *scratch = sbi_scratch_thishart_ptr();
ulong smode = (csr_read(CSR_MSTATUS) & MSTATUS_MPP) >>
MSTATUS_MPP_SHIFT;
switch (funcid) {
case SBI_EXT_HSM_HART_START:
ret = sbi_hsm_hart_start(scratch, sbi_domain_thishart_ptr(),
regs->a0, regs->a1, smode, regs->a2);
break;
case SBI_EXT_HSM_HART_STOP:
ret = sbi_hsm_hart_stop(scratch, TRUE);
break;
case SBI_EXT_HSM_HART_GET_STATUS:
ret = sbi_hsm_hart_get_state(sbi_domain_thishart_ptr(),
regs->a0);
break;
case SBI_EXT_HSM_HART_SUSPEND:
ret = sbi_hsm_hart_suspend(scratch, regs->a0, regs->a1,
smode, regs->a2);
break;
default:
ret = SBI_ENOTSUPP;
};
if (ret >= 0) {
*out_val = ret;
ret = 0;
}
return ret;
}
sbi_hsm_hart_start()
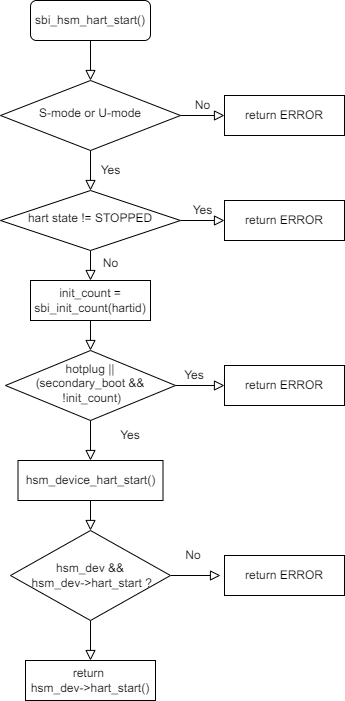
接着来看对应 HSM 函数调用的具体实现,流程图如上所示。在 lib/sbi/sbi_hsm.c 中,以 HART start 对应的函数 sbi_hsm_hart_start 为例,该函数中首先判断要启动的特权模式是否为 S 模式或 U 模式:
/* For now, we only allow start mode to be S-mode or U-mode. */
if (smode != PRV_S && smode != PRV_U)
return SBI_EINVAL;
随后通过如下代码进行 hdata 中 hart 状态的设置:
hdata = sbi_scratch_offset_ptr(rscratch, hart_data_offset);
hstate = atomic_cmpxchg(&hdata->state, SBI_HSM_STATE_STOPPED,
SBI_HSM_STATE_START_PENDING);
其中 atomic_cmpxchg 函数最终调用了宏 __cmpxchg,进行 hdata 结构体中 state 的切换。cmpxchg 实现的功能是比较和交换,atomic 前缀表示其为原子操作的一种。atomic_cmpxchg(ptr, o, n) 会在 ptr 指向位置上的值与 o 参数值相同时将 n 写入 ptr 指向的位置,并返回 o 的值,值不同时返回 ptr 指向的位置上的值。因此若 hart 已处于 STOPPED 状态,hstate 的值将会变为 SBI_HSM_STATE_STOPPED,否则 HSTATE 的值为 hdata->state 的值。
OpenSBI 会根据 hsate 的值对该 hart 调用 HART start 之前的状态进行判断。若在调用 HART start 时该 hart 不处于 STOPPED 态,OpenSBI 会认为此时的 HART start 为非法请求。根据先前 hart 所处状态的不同,会返回不同的错误类型。
if (hstate == SBI_HSM_STATE_STARTED)
return SBI_EALREADY;
/**
* if a hart is already transition to start or stop, another start call
* is considered as invalid request.
*/
if (hstate != SBI_HSM_STATE_STOPPED)
return SBI_EINVAL;
随后通过 sbi_init_count 判断 hartid 对应 hart 的初始化次数,结果存入 init_count 中:
init_count = sbi_init_count(hartid);
从 这个 commit 开始,OpenSBI 将 HSM 扩展相关的操作实现为一种设备,简化了 HSM 的实现,原先对于平台的 HSM 相关操作改为了对 HSM 设备进行操作。我们可以在 sbi_hsm_hart_start 函数中看见如下代码,其中的判断函数都是基于 hsm_dev 这一设备进行判断:
if (hsm_device_has_hart_hotplug() ||
(hsm_device_has_hart_secondary_boot() && !init_count)) {
return hsm_device_hart_start(hartid, scratch->warmboot_addr);
} else {
int rc = sbi_ipi_raw_send(hartid);
if (rc)
return rc;
}
首先判断设备是否支持 hart 的热拔插,或支持 hart 二级启动且没有初始化过;若是,则会通过 hsm_device_hart_start 函数来调用设备的 hart_start 函数实现状态切换,否则发送 IPI 中断。hsm_device_hart_start 的实现如下:
static int hsm_device_hart_start(u32 hartid, ulong saddr)
{
if (hsm_dev && hsm_dev->hart_start)
return hsm_dev->hart_start(hartid, saddr);
return SBI_ENOTSUPP;
}
与之类似的函数还有 hsm_device_hart_suspend 等,OpenSBI 通过这些函数判断设备是否实现了上述的 HSM 函数,并进行调用。
总结
本文简要介绍了 RISC-V 中的特权架构,OpenSBI v1.1 中三种固件的参数、功能和优缺点,并以 HSM 扩展中的 HART start 函数为例介绍了 SBI 规范的 HSM 扩展在 OpenSBI 中的实现。
FW_DYNAMIC 类型的固件相比 FW_JUMP 局限性更少,且引入该类型固件不会影响 FW_JUMP 与 FW_PAYLOAD 的正常使用,目前已经取代了 FW_JUMP 成为了 QEMU RISC-V ‘virt’ 平台的默认选择。
SBI HSM 扩展的引入使得 S 模式能够对 hart 的状态进行管理,能够以指定的顺序启动多个 harts,而不是以随机顺序启动。
OpenSBI 在对 HSM 函数进行调用时提供了一些判断来过滤非法调用,并能够根据情况返回对应的错误类型。
参考资料
- QEMU 启动方式分析(3): QEMU 代码与 RISCV ‘virt’ 平台 ZSBL 分析
- OpenSBI 仓库
- RISC-V OpenSBI Deep Dive
- RISC-V SBI 文档
- OpenSBI 快速上手
- RISC-V 特权模式
- QEMU commit message: riscv: Add opensbi firmware dynamic support
- OpenSBI v0.6 与 v0.7 差异
- OpenSBI commit message: lib: Implement hart hotplug
- riscv asm cmpxchg 实现解析
- OpenSBI commit message: lib: sbi: Simplify HSM platform operations
- U-Boot commit message: spl: opensbi: specify main hart as preferred boot hart
- 一文玩转ARM64 SMP多核启动(二)- PSCI(超级详细~) - 知乎 (zhihu.com)
- [PATCH] riscv: qemu: spl: Fix booting Linux kernel with OpenSBI 1.0+ (mail-archive.com)
猜你喜欢:
- 我要投稿:发表原创技术文章,收获福利、挚友与行业影响力
- 知识星球:独家 Linux 实战经验与技巧,订阅「Linux知识星球」
- 视频频道:泰晓学院,B 站,发布各类 Linux 视频课
- 开源小店:欢迎光临泰晓科技自营店,购物支持泰晓原创
- 技术交流:Linux 用户技术交流微信群,联系微信号:tinylab
| 支付宝打赏 ¥9.68元 | 微信打赏 ¥9.68元 | |
 |  请作者喝杯咖啡吧 |  |
Read Album:
- Stratovirt 的 RISC-V 虚拟化支持(六):PLIC 和 串口支持
- Stratovirt 的 RISC-V 虚拟化支持(五):BootLoader 和设备树
- Stratovirt 的 RISC-V 虚拟化支持(四):内存模型和 CPU 模型
- Stratovirt 的 RISC-V 虚拟化支持(三):KVM 模型
- Stratovirt 的 RISC-V 虚拟化支持(二):库的 RISC-V 适配
