

[置顶] 泰晓 RISC-V 实验箱,配套 30+ 讲嵌入式 Linux 系统开发公开课
RISC-V Syscall 系列 4:vDSO 实现原理分析
Corrector: TinyCorrect v0.1-rc1 - [images urls] Author: envestcc chen1233216@hotmail.com Date: 2022/08/16 Revisor: Falcon falcon@tinylab.org Project: RISC-V Linux 内核剖析 Environment: 泰晓 Linux 实验盘 Sponsor: PLCT Lab, ISCAS
概述
在上一篇文章 什么是 vDSO 中介绍了 vDSO 的相关背景和概念,本篇文章会进一步通过对 Linux 内核及 glibc 相关代码的研究,来分析 vDSO 的实现原理。
说明:文中涉及的 Linux 源码是基于 5.17 版本,glibc 是基于 2.35 版本。
Build
Linux 内核中 vDSO 代码包括以下几部分:
- lib/vdso/:架构无关部分
- gettimeofday.c
- arch/riscv/kernel/:架构相关部分
- vdso.c:数据结构定义及初始化
- vdso/:导出函数入口
- flush_icache.S
- getcpu.S
- rt_sigreturn.S
- vgettimeofday.c
- vdso.S
- vdso.lds.S
下面未加路径的文件默认路径为 arch/riscv/kernel/vdso
flowchart LR;
J(lib/vdso/gettimeofday.c)-->F;
A(vgettimeofday.c)-->F(vdso.so.dbg / linux-vdso.so.1);
B(flush_icache.S)-->F;
C(getcpu.S)-->F;
D(rt_sigreturn.S)-->F;
M(note.S)-->F;
E(vdso.lds.S)-->F;
F-- objcopy -S --->G(vdso.so)
G-->H(vdso.o)
I(vdso.S)-- .incbin --->H
H-->K(kernel)
L(arch/riscv/kernel/vdso.c)-->K
上图描述了上述代码如何编译成 linux-vdso.so.1 及如何集成到内核中的大体流程。整个流程大致可以分为两个阶段:
- 生成共享库
linux-vdso.so.1 - 共享库集成到内核
下面会结合内核编译日志和内核源码一起分析整个构建过程。
生成共享库 linux-vdso.so.1
生成共享库主要分为两个阶段:
- 编译生成 .o 文件
- 链接生成 .so 共享库文件
编译生成 .o 文件
在 Linux Lab 下,可通过 make kernel arch/riscv/kernel/vdso/*.o V=1 查看到生成 .o 的过程:
riscv64-linux-gnu-gcc -E -Wp,-MMD,arch/riscv/kernel/vdso/.vdso.lds.d -nostdinc -I./arch/riscv/include -I./arch/riscv/include/generated -I./include -I./arch/riscv/include/uapi -I./arch/riscv/include/generated/uapi -I./include/uapi -I./include/generated/uapi -include ./include/linux/compiler-version.h -include ./include/linux/kconfig.h -D__KERNEL__ -fmacro-prefix-map=./= -P -C -Uriscv -P -Uriscv -D__ASSEMBLY__ -DLINKER_SCRIPT -o arch/riscv/kernel/vdso/vdso.lds arch/riscv/kernel/vdso/vdso.lds.S
riscv64-linux-gnu-gcc -Wp,-MMD,arch/riscv/kernel/vdso/.rt_sigreturn.o.d -nostdinc -I./arch/riscv/include -I./arch/riscv/include/generated -I./include -I./arch/riscv/include/uapi -I./arch/riscv/include/generated/uapi -I./include/uapi -I./include/generated/uapi -include ./include/linux/compiler-version.h -include ./include/linux/kconfig.h -D__KERNEL__ -fmacro-prefix-map=./= -D__ASSEMBLY__ -fno-PIE -mabi=lp64 -march=rv64imafdc -Wa,-gdwarf-2 -c -o arch/riscv/kernel/vdso/rt_sigreturn.o arch/riscv/kernel/vdso/rt_sigreturn.S
riscv64-linux-gnu-gcc -Wp,-MMD,arch/riscv/kernel/vdso/.vgettimeofday.o.d -nostdinc -I./arch/riscv/include -I./arch/riscv/include/generated -I./include -I./arch/riscv/include/uapi -I./arch/riscv/include/generated/uapi -I./include/uapi -I./include/generated/uapi -include ./include/linux/compiler-version.h -include ./include/linux/kconfig.h -include ./include/linux/compiler_types.h -D__KERNEL__ -fmacro-prefix-map=./= -Wall -Wundef -Werror=strict-prototypes -Wno-trigraphs -fno-strict-aliasing -fno-common -fshort-wchar -fno-PIE -Werror=implicit-function-declaration -Werror=implicit-int -Werror=return-type -Wno-format-security -std=gnu89 -mabi=lp64 -march=rv64imac -mno-save-restore -DCONFIG_PAGE_OFFSET=0xffffaf8000000000 -mcmodel=medany -fno-omit-frame-pointer -mstrict-align -fno-delete-null-pointer-checks -Wno-frame-address -Wno-format-truncation -Wno-format-overflow -Wno-address-of-packed-member -O2 --param=allow-store-data-races=0 -Wframe-larger-than=2048 -fstack-protector-strong -Wimplicit-fallthrough=5 -Wno-main -Wno-unused-but-set-variable -Wno-unused-const-variable -fno-omit-frame-pointer -fno-optimize-sibling-calls -fno-stack-clash-protection -Wdeclaration-after-statement -Wvla -Wno-pointer-sign -Wcast-function-type -Wno-stringop-truncation -Wno-array-bounds -Wno-stringop-overflow -Wno-restrict -Wno-maybe-uninitialized -Wno-alloc-size-larger-than -fno-strict-overflow -fno-stack-check -fconserve-stack -Werror=date-time -Werror=incompatible-pointer-types -Werror=designated-init -Wno-packed-not-aligned -g -fno-stack-protector -fPIC -include /labs/linux-lab/src/linux-stable/lib/vdso/gettimeofday.c -DKBUILD_MODFILE='"arch/riscv/kernel/vdso/vgettimeofday"' -DKBUILD_BASENAME='"vgettimeofday"' -DKBUILD_MODNAME='"vgettimeofday"' -D__KBUILD_MODNAME=kmod_vgettimeofday -c -o arch/riscv/kernel/vdso/vgettimeofday.o arch/riscv/kernel/vdso/vgettimeofday.c
riscv64-linux-gnu-gcc -Wp,-MMD,arch/riscv/kernel/vdso/.getcpu.o.d -nostdinc -I./arch/riscv/include -I./arch/riscv/include/generated -I./include -I./arch/riscv/include/uapi -I./arch/riscv/include/generated/uapi -I./include/uapi -I./include/generated/uapi -include ./include/linux/compiler-version.h -include ./include/linux/kconfig.h -D__KERNEL__ -fmacro-prefix-map=./= -D__ASSEMBLY__ -fno-PIE -mabi=lp64 -march=rv64imafdc -Wa,-gdwarf-2 -c -o arch/riscv/kernel/vdso/getcpu.o arch/riscv/kernel/vdso/getcpu.S
riscv64-linux-gnu-gcc -Wp,-MMD,arch/riscv/kernel/vdso/.flush_icache.o.d -nostdinc -I./arch/riscv/include -I./arch/riscv/include/generated -I./include -I./arch/riscv/include/uapi -I./arch/riscv/include/generated/uapi -I./include/uapi -I./include/generated/uapi -include ./include/linux/compiler-version.h -include ./include/linux/kconfig.h -D__KERNEL__ -fmacro-prefix-map=./= -D__ASSEMBLY__ -fno-PIE -mabi=lp64 -march=rv64imafdc -Wa,-gdwarf-2 -c -o arch/riscv/kernel/vdso/flush_icache.o arch/riscv/kernel/vdso/flush_icache.S
riscv64-linux-gnu-gcc -Wp,-MMD,arch/riscv/kernel/vdso/.note.o.d -nostdinc -I./arch/riscv/include -I./arch/riscv/include/generated -I./include -I./arch/riscv/include/uapi -I./arch/riscv/include/generated/uapi -I./include/uapi -I./include/generated/uapi -include ./include/linux/compiler-version.h -include ./include/linux/kconfig.h -D__KERNEL__ -fmacro-prefix-map=./= -D__ASSEMBLY__ -fno-PIE -mabi=lp64 -march=rv64imafdc -Wa,-gdwarf-2 -c -o arch/riscv/kernel/vdso/note.o arch/riscv/kernel/vdso/note.S
从上述编译日志可以看出,首先 vdso.lds.S 是链接脚本文件,会通过 gcc -E 命令执行预处理。然后 lib/vdso/gettimeofday.c,vgettimeofday.c,flush_icache.S,getcpu.S,rt_sigreturn.S,note.S 这几个文件会通过 gcc -c 命令编译成 .o 文件。
链接生成 .so 共享库文件
在 Linux Lab 下,可通过 make kernel arch/riscv/kernel/vdso/vdso.so V=1 查看到生成 .so 的过程:
riscv64-linux-gnu-ld -melf64lriscv -shared -S -soname=linux-vdso.so.1 --build-id=sha1 --hash-style=both --eh-frame-hdr -T arch/riscv/kernel/vdso/vdso.lds arch/riscv/kernel/vdso/rt_sigreturn.o arch/riscv/kernel/vdso/vgettimeofday.o arch/riscv/kernel/vdso/getcpu.o arch/riscv/kernel/vdso/flush_icache.o arch/riscv/kernel/vdso/note.o -o arch/riscv/kernel/vdso/vdso.so.dbg.tmp && riscv64-linux-gnu-objcopy -G __vdso_rt_sigreturn -G __vdso_vgettimeofday -G __vdso_getcpu -G __vdso_flush_icache arch/riscv/kernel/vdso/vdso.so.dbg.tmp arch/riscv/kernel/vdso/vdso.so.dbg && rm arch/riscv/kernel/vdso/vdso.so.dbg.tmp
通过把上一步生成的中间文件通过 ld 命令链接起来,最后生成 vdso.so.dbg 共享库文件。这里通过 -soname=linux-vdso.so.1 参数指定了库的真实名字。另外其中的 objcopy -G 命令是将本地函数变为全局函数,我理解现在的版本中已经不需要了,因为在后面的流程中,会移除静态符号表信息。
vdso.so.dbg 的真实名字就是 linux-vdso.so.1,也可以通过下面的命令进行验证:
$ readelf -d /labs/linux-lab/build/riscv64/virt/linux/v5.17/arch/riscv/kernel/vdso/vdso.so.dbg
Dynamic section at offset 0x390 contains 14 entries:
Tag Type Name/Value
0x000000000000000e (SONAME) Library soname: [linux-vdso.so.1]
0x0000000000000004 (HASH) 0x120
0x000000006ffffef5 (GNU_HASH) 0x158
0x0000000000000005 (STRTAB) 0x270
0x0000000000000006 (SYMTAB) 0x198
0x000000000000000a (STRSZ) 143 (bytes)
0x000000000000000b (SYMENT) 24 (bytes)
0x0000000000000007 (RELA) 0x0
0x0000000000000008 (RELASZ) 0 (bytes)
0x0000000000000009 (RELAENT) 24 (bytes)
0x000000006ffffffc (VERDEF) 0x318
0x000000006ffffffd (VERDEFNUM) 2
0x000000006ffffff0 (VERSYM) 0x300
0x0000000000000000 (NULL) 0x0
共享库集成到内核
riscv64-linux-gnu-objcopy -S arch/riscv/kernel/vdso/vdso.so.dbg arch/riscv/kernel/vdso/vdso.so
先通过 objcopy -S 命令将 vdso.so.dbg 移除符号信息进而生成 vdso.so。这主要是为了减少集成到内核的代码大小。
$ readelf -sW /labs/linux-lab/build/riscv64/virt/linux/v5.17/arch/riscv/kernel/vdso/vdso.so.dbg
Symbol table '.dynsym' contains 9 entries:
Num: Value Size Type Bind Vis Ndx Name
...
__vdso_gettimeofday@@LINUX_4.15
3: 0000000000000bee 122 FUNC GLOBAL DEFAULT 11
...
Symbol table '.symtab' contains 29 entries:
Num: Value Size Type Bind Vis Ndx Name
...
14: 0000000000000000 0 FILE LOCAL DEFAULT ABS vgettimeofday.c
15: 0000000000000000 0 FILE LOCAL DEFAULT ABS
16: fffffffffffff000 0 NOTYPE LOCAL DEFAULT ABS _timens_data
17: 0000000000000390 0 OBJECT LOCAL DEFAULT ABS _DYNAMIC
18: 0000000000000c80 0 OBJECT LOCAL DEFAULT ABS _PROCEDURE_LINKAGE_TABLE_
19: ffffffffffffe000 0 NOTYPE LOCAL DEFAULT 1 _vdso_data
...
$ readelf -sW /labs/linux-lab/build/riscv64/virt/linux/v5.17/arch/riscv/kernel/vdso/vdso.so
Symbol table '.dynsym' contains 9 entries:
Num: Value Size Type Bind Vis Ndx Name
...
2: 0000000000000a64 394 FUNC GLOBAL DEFAULT 11 __vdso_gettimeofday@@LINUX_4.15
...
通过上面两个命令输出的对比,能看出 vdso.dbg.so 生成 vdso.so 之后移除了静态符号表信息。
riscv64-linux-gnu-gcc -Wp,-MMD,arch/riscv/kernel/.vdso.o.d -nostdinc -I./arch/riscv/include -I./arch/riscv/include/generated -I./include -I./arch/riscv/include/uapi -I./arch/riscv/include/generated/uapi -I./include/uapi -I./include/generated/uapi -include ./include/linux/compiler-version.h -include ./include/linux/kconfig.h -include ./include/linux/compiler_types.h -D__KERNEL__ -fmacro-prefix-map=./= -Wall -Wundef -Werror=strict-prototypes -Wno-trigraphs -fno-strict-aliasing -fno-common -fshort-wchar -fno-PIE -Werror=implicit-function-declaration -Werror=implicit-int -Werror=return-type -Wno-format-security -std=gnu89 -mabi=lp64 -march=rv64imac -mno-save-restore -DCONFIG_PAGE_OFFSET=0xffffaf8000000000 -mcmodel=medany -fno-omit-frame-pointer -mstrict-align -fno-delete-null-pointer-checks -Wno-frame-address -Wno-format-truncation -Wno-format-overflow -Wno-address-of-packed-member -O2 --param=allow-store-data-races=0 -Wframe-larger-than=2048 -fstack-protector-strong -Wimplicit-fallthrough=5 -Wno-main -Wno-unused-but-set-variable -Wno-unused-const-variable -fno-omit-frame-pointer -fno-optimize-sibling-calls -fno-stack-clash-protection -Wdeclaration-after-statement -Wvla -Wno-pointer-sign -Wcast-function-type -Wno-stringop-truncation -Wno-array-bounds -Wno-stringop-overflow -Wno-restrict -Wno-maybe-uninitialized -Wno-alloc-size-larger-than -fno-strict-overflow -fno-stack-check -fconserve-stack -Werror=date-time -Werror=incompatible-pointer-types -Werror=designated-init -Wno-packed-not-aligned -g -DKBUILD_MODFILE='"arch/riscv/kernel/vdso"' -DKBUILD_BASENAME='"vdso"' -DKBUILD_MODNAME='"vdso"' -D__KBUILD_MODNAME=kmod_vdso -c -o arch/riscv/kernel/vdso.o arch/riscv/kernel/vdso.c
然后通过 gcc 命令将 arch/riscv/kernel/vdso.c 编译成 arch/riscv/kernel/vdso.o 文件。
riscv64-linux-gnu-gcc -Wp,-MMD,arch/riscv/kernel/vdso/.vdso.o.d -nostdinc -I./arch/riscv/include -I./arch/riscv/include/generated -I./include -I./arch/riscv/include/uapi -I./arch/riscv/include/generated/uapi -I./include/uapi -I./include/generated/uapi -include ./include/linux/compiler-version.h -include ./include/linux/kconfig.h -D__KERNEL__ -fmacro-prefix-map=./= -D__ASSEMBLY__ -fno-PIE -mabi=lp64 -march=rv64imafdc -Wa,-gdwarf-2 -c -o arch/riscv/kernel/vdso/vdso.o arch/riscv/kernel/vdso/vdso.S
然后又通过 gcc 命令将 vdso.S 编译生成了 vdso.o 文件。vdso.S 文件内部其实就是通过 .incbin 将 vdso.so 共享库包含进来,同时设置一下内存页对齐。vdso.S 的代码如下:
#include <linux/init.h>
#include <linux/linkage.h>
#include <asm/page.h>
__PAGE_ALIGNED_DATA
.globl vdso_start, vdso_end
.balign PAGE_SIZE
vdso_start:
.incbin "arch/riscv/kernel/vdso/vdso.so"
.balign PAGE_SIZE
vdso_end:
.previous
注意这里的
vdso.o文件和上一步生成的arch/riscv/kernel/vdso.o不在同一个目录下。
riscv64-linux-gnu-ar cDPrST arch/riscv/kernel/vdso/built-in.a arch/riscv/kernel/vdso/vdso.o
riscv64-linux-gnu-ar cDPrST arch/riscv/kernel/built-in.a arch/riscv/kernel/vdso.o arch/riscv/kernel/vdso/built-in.a ...
然后通过 ar 命令将 vdso.o 打包到 built-in.a 文件中,再将 built-in.a 和 arch/riscv/kernel/vdso.o 一起打包到 arch/riscv/kernel/built-in.a 文件中,最终被打包进内核中。
vDSO 初始化
vDSO 的初始化按照触发时机可以分为两部分:
- 内核启动时初始化
- 用户进程启动时初始化
内核启动时初始化
内核启动时初始化的主要是 vdso_info 这个内核对象。它包含的主要信息包括:
- vDSO 代码在内核中的地址
- vDSO 数据在内核中的地址
- vDSO 代码部分虚拟内存映射结构
- vDSO 数据部分虚拟内存映射结构
vdso_info 源码中的相关定义如下:
// arch/riscv/kernel/vdso.c
extern char vdso_start[], vdso_end[];
struct __vdso_info {
const char *name;
const char *vdso_code_start; // vdso 代码起始地址
const char *vdso_code_end; // vdso 代码结束地址
unsigned long vdso_pages; // vdso 代码部分所占内存页数
/* Data Mapping */
struct vm_special_mapping *dm;
/* Code Mapping */
struct vm_special_mapping *cm;
};
// include/linux/mm_types.h
struct vm_special_mapping {
const char *name; /* The name, e.g. "[vdso]". */
/*
* If .fault is not provided, this points to a
* NULL-terminated array of pages that back the special mapping.
*
* This must not be NULL unless .fault is provided.
*/
struct page **pages;
/*
* If non-NULL, then this is called to resolve page faults
* on the special mapping. If used, .pages is not checked.
*/
vm_fault_t (*fault)(const struct vm_special_mapping *sm,
struct vm_area_struct *vma,
struct vm_fault *vmf);
int (*mremap)(const struct vm_special_mapping *sm,
struct vm_area_struct *new_vma);
};
vDSO 内核中代码部分地址初始化的时候,vdso_code_start 和 vdso_code_end 分别赋值了 vdso_start 和 vdso_end。它们声明成了外部引用,实际上 vdso_start 和 vdso_end 这两个变量定义在本文 共享库集成到内核 章节中提到的 vdso.S 文件中,它们表示了 vDSO 代码段的起始位置和结束位置。
vDSO 内核中数据部分的定义就是 vdso_data。它直接定义在内核代码中。
// arch/riscv/kernel/vdso.c
static union {
struct vdso_data data;
u8 page[PAGE_SIZE];
} vdso_data_store __page_aligned_data;
struct vdso_data *vdso_data = &vdso_data_store.data;
static struct __vdso_info vdso_info __ro_after_init = {
.name = "vdso",
.vdso_code_start = vdso_start,
.vdso_code_end = vdso_end,
};
dm 和 cm 分别表示代码和数据部分的 vm_special_mapping(虚拟内存特殊映射对象)。
cm 使用定义在内核的静态变量 rv_vdso_maps 进行初始化,其中比较重要的 pages 内存页成员在 __vdso_init 函数中进行初始化,申请代码部分所占页数量的内存页,并建立虚拟内存和物理内存页映射。
// arch/riscv/kernel/vdso.c
static struct vm_special_mapping rv_vdso_maps[] __ro_after_init = {
[RV_VDSO_MAP_VVAR] = {
.name = "[vvar]",
.fault = vvar_fault,
},
[RV_VDSO_MAP_VDSO] = {
.name = "[vdso]",
.mremap = vdso_mremap,
},
};
static int __init vdso_init(void)
{
vdso_info.dm = &rv_vdso_maps[RV_VDSO_MAP_VVAR];
vdso_info.cm = &rv_vdso_maps[RV_VDSO_MAP_VDSO];
return __vdso_init();
}
static int __init __vdso_init(void)
{
unsigned int i;
struct page **vdso_pagelist;
unsigned long pfn;
if (memcmp(vdso_info.vdso_code_start, "\177ELF", 4)) {
pr_err("vDSO is not a valid ELF object!\n");
return -EINVAL;
}
vdso_info.vdso_pages = (
vdso_info.vdso_code_end -
vdso_info.vdso_code_start) >>
PAGE_SHIFT;
vdso_pagelist = kcalloc(vdso_info.vdso_pages,
sizeof(struct page *),
GFP_KERNEL);
if (vdso_pagelist == NULL)
return -ENOMEM;
/* Grab the vDSO code pages. */
pfn = sym_to_pfn(vdso_info.vdso_code_start);
for (i = 0; i < vdso_info.vdso_pages; i++)
vdso_pagelist[i] = pfn_to_page(pfn + i);
vdso_info.cm->pages = vdso_pagelist;
return 0;
}
dm 的初始化在 vvar_fault 函数中实现。vvar_fault 是 dm 缺页中断的回调函数。从代码中可以看出,实际映射的对象是上文中提到的内核定义的数据部分对象 vdso_data。
// arch/riscv/kernel/vdso.c
static vm_fault_t vvar_fault(const struct vm_special_mapping *sm,
struct vm_area_struct *vma, struct vm_fault *vmf)
{
...
pfn = sym_to_pfn(vdso_data);
...
}
用户进程启动时初始化
接下来是在用户进程启动时才会执行的初始化过程,主要的目的是初始化加速系统调用的几个函数指针,以达到用户程序调用 glibc 中支持 vDSO 函数时能够正确跳转到 vDSO 相应的代码地址。
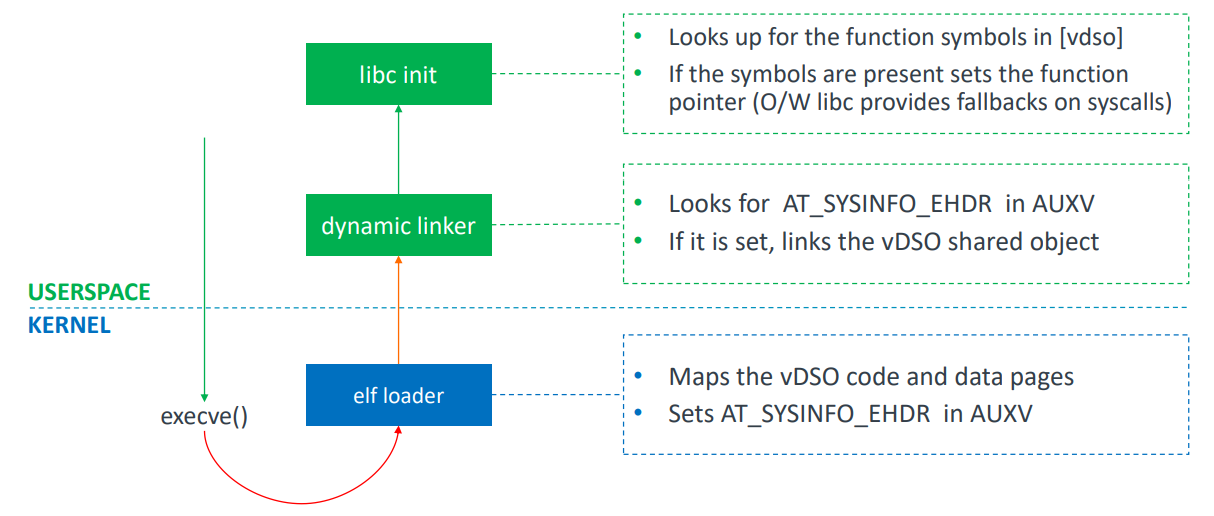
但是程序启动过程有些复杂,涉及到 vDSO 相关的大致可以分为三个阶段:
- 在内核态执行 execve 系统调用,将 vDSO 代码和数据映射到用户内存,并将代码地址记录在用户栈内存中
- 在用户态执行 dynamic linker,找到 vDSO 代码地址并加载,初始化 vDSO 函数的地址
- 在用户态执行 libc init,针对静态链接的程序进行初始化 vDSO 函数的地址
execve
在 Linux 系统中,运行一个程序依赖 fork 和 execve 这两个系统调用。fork 会创建一个新进程并复制父进程的数据到新进程中;而 execve 则是解析 ELF 文件,将其载入内存,并修改进程的堆栈数据来准备运行环境。而 vDSO 的初始化功能也是在 execve 中完成的。
// fs/exec.c
SYSCALL_DEFINE3(execve,
const char __user *, filename,
const char __user *const __user *, argv,
const char __user *const __user *, envp)
{
return do_execve(getname(filename), argv, envp);
}
SYSCALL_DEFINE3 是定义系统调用的宏,详情可以参考本系列之前的文章 RISC-V Syscall 系列 2:Syscall 过程分析。
execve 会先经过如下函数调用到达 load_elf_binary:
do_execvedo_execveat_common:初始化环境和启动参数信息bprm_execve:打开文件,使调度器负载均衡等exec_binprmsearch_binary_handler:寻找文件格式对应的解析模块fmt->load_binary():调用格式对应的载入函数
而对于 ELF 文件来说,load_binary 就是 load_elf_binary,下面是 ELF 文件格式载入函数的初始化代码和 load_elf_binary 函数代码。
// fs/binfmt_elf.c
static struct linux_binfmt elf_format = {
.module = THIS_MODULE,
.load_binary = load_elf_binary,
.load_shlib = load_elf_library,
.core_dump = elf_core_dump,
.min_coredump = ELF_EXEC_PAGESIZE,
};
static int load_elf_binary(struct linux_binprm *bprm)
{
...
retval = ARCH_SETUP_ADDITIONAL_PAGES(bprm, elf_ex, !!interpreter);
...
retval = create_elf_tables(bprm, elf_ex,load_addr, interp_load_addr, e_entry);
...
}
// include/linux/elf.h
#define ARCH_SETUP_ADDITIONAL_PAGES(bprm, ex, interpreter) arch_setup_additional_pages(bprm, interpreter)
load_elf_binary 函数内容比较庞大,实现了加载 ELF 文件的核心逻辑。其中跟 vDSO 初始化相关的有如下两个函数:
arch_setup_additional_pagescreate_elf_tables
arch_setup_additional_pages
arch_setup_additional_pages 是处理器架构相关的函数,里面主要调用了 __setup_additional_pages,它的主要功能是将 vDSO 的代码部分 (text) 和数据部分(vvar)载入用户内存。具体代码如下:
// arch/riscv/kernel/vdso.c
enum vvar_pages {
VVAR_DATA_PAGE_OFFSET,
VVAR_TIMENS_PAGE_OFFSET,
VVAR_NR_PAGES,
};
#define VVAR_SIZE (VVAR_NR_PAGES << PAGE_SHIFT)
int arch_setup_additional_pages(struct linux_binprm *bprm, int uses_interp)
{
...
ret = __setup_additional_pages(mm, bprm, uses_interp);
...
}
static int __setup_additional_pages(struct mm_struct *mm, struct linux_binprm *bprm, int uses_interp)
{
unsigned long vdso_base, vdso_text_len, vdso_mapping_len;
void *ret;
BUILD_BUG_ON(VVAR_NR_PAGES != __VVAR_PAGES);
vdso_text_len = vdso_info.vdso_pages << PAGE_SHIFT;
/* Be sure to map the data page */
vdso_mapping_len = vdso_text_len + VVAR_SIZE;
vdso_base = get_unmapped_area(NULL, 0, vdso_mapping_len, 0, 0);
if (IS_ERR_VALUE(vdso_base)) {
ret = ERR_PTR(vdso_base);
goto up_fail;
}
ret = _install_special_mapping(mm, vdso_base, VVAR_SIZE,
(VM_READ | VM_MAYREAD | VM_PFNMAP), vdso_info.dm);
if (IS_ERR(ret))
goto up_fail;
vdso_base += VVAR_SIZE;
mm->context.vdso = (void *)vdso_base;
ret =
_install_special_mapping(mm, vdso_base, vdso_text_len,
(VM_READ | VM_EXEC | VM_MAYREAD | VM_MAYWRITE | VM_MAYEXEC),
vdso_info.cm);
if (IS_ERR(ret))
goto up_fail;
return 0;
up_fail:
mm->context.vdso = NULL;
return PTR_ERR(ret);
}
首先计算 vDSO 映射需要占用的内存空间大小 vdso_mapping_len。它由 vdso_text_len 代码部分和 VVAR_SIZE 数据部分相加得到。vdso_text_len 很显然可以由 vdso_info.vdso_pages 代码段所占内存页数乘以内存页大小计算得到,而代码中 vdso_info.vdso_pages << PAGE_SHIFT 的计算可以达到相同的效果。而通过查看 VVAR_SIZE 的定义可知,目前内核给 vDSO 数据部分分配了两个内存页。
然后调用 get_unmapped_area 内核接口在当前进程的用户空间中获取一个为映射区间的起始地址,其中第三个参数表示获取的为映射空间的大小。
然后调用 _install_special_mapping 将 vDSO 的数据部分映射到用户内存中。这里的第四个参数可以设置内存页的访问标记,这里可以简单理解为用户程序对 vDSO 的数据部分是只读的,具体分别设置了三个值:
- VM_READ:内存页可读取
- VM_MAYREAD:VM_READ 标志可被设置
- VM_PFNMAP:Page-ranges managed without “struct page”, just pure PFN
最后再次调用 _install_special_mapping 将 vDSO 的代码部分映射到用户内存中,位置紧接着数据部分。与数据页标记不同,用户程序对代码部分是可读可执行的,具体设置了五个值:
- VM_READ:内存页可读取
- VM_EXEC:内存页可执行
- VM_MAYREAD:VM_READ 标志可被设置
- VM_MAYWRITE:VM_WRITE 标志可被设置
- VM_MAYEXEC:VM_EXEC 标志可被设置
create_elf_tables
create_elf_tables 主要负责添加需要的信息到应用程序用户栈中,包括 auxiliary vector(辅助向量),argv(命令行参数),environ(环境变量)。而 vDSO 的地址信息就写入了 auxiliary vector。
auxiliary vector 是一种用户态和内核态之间通信的一种机制。本质上来说,它是由一系列键值对组成的一个列表。内核在加载应用程序时会将其存储在用户栈上。可以通过在运行程序时添加 LD_SHOW_AUXV 环境变量来查看列表的具体内容,其中 AT_SYSINFO_EHDR 对应的就是 vDSO 代码部分的起始地址。示例如下:
$ LD_SHOW_AUXV=1 sleep 1
AT_SYSINFO_EHDR: 0x7fff9d185000
AT_HWCAP: bfebfbff
AT_PAGESZ: 4096
AT_CLKTCK: 100
AT_PHDR: 0x55c64e14c040
AT_PHENT: 56
AT_PHNUM: 13
AT_BASE: 0x7fd3399b8000
AT_FLAGS: 0x0
AT_ENTRY: 0x55c64e14e850
AT_UID: 1000
AT_EUID: 1000
AT_GID: 1000
AT_EGID: 1000
AT_SECURE: 0
AT_RANDOM: 0x7fff9d111309
AT_HWCAP2: 0x2
AT_EXECFN: /usr/bin/sleep
AT_PLATFORM: x86_64
create_elf_tables 的具体代码如下:
// fs/binfmt_elf.c
static int create_elf_tables(struct linux_binprm *bprm, const struct elfhdr *exec, unsigned long load_addr, unsigned long interp_load_addr,unsigned long e_entry)
{
...
elf_info = (elf_addr_t *)mm->saved_auxv;
#define NEW_AUX_ENT(id, val) \
do { \
*elf_info++ = id; \
*elf_info++ = val; \
} while (0)
...
ARCH_DLINFO;
...
}
NEW_AUX_ENT 是一个用来给 auxiliary vector 添加健值对的宏,其中 elf_info 的实际是指向 unsigned long saved_auxv[AT_VECTOR_SIZE] 这样一个存储在 mm 中的一个数组,每两个元素组成一个键值对。
ARCH_DLINFO 是一个初始化多个键值对的宏定义,展开如下:
// arch/riscv/include/asm/elf.h
#define ARCH_DLINFO \
do { \
NEW_AUX_ENT(AT_SYSINFO_EHDR, \
(elf_addr_t)current->mm->context.vdso); \
...
} while (0)
可以看出,这里将 AT_SYSINFO_EHDR 对应的值赋值成了 mm->context.vdso,而根据上文中列出的 __setup_additional_pages 函数代码,可以看出实际上赋值的就是 vDSO 代码部分的起始地址。
start_thread
// fs/binfmt_elf.c
#define START_THREAD(elf_ex, regs, elf_entry, start_stack) start_thread(regs, elf_entry, start_stack)
START_THREAD(elf_ex, regs, elf_entry, bprm->p);
// arch/riscv/kernel/process.c
void start_thread(struct pt_regs *regs, unsigned long pc,
unsigned long sp)
{
...
regs->epc = pc;
regs->sp = sp;
}
最后,start_thread 会将 epc 和 sp 改成新的地址,使得 execve 系统调用返回到用户空间时就能进入新的程序入口。
// fs/binfmt_elf.c
static int load_elf_binary(struct linux_binprm *bprm)
{
...
e_entry = elf_ex->e_entry + load_bias;
...
if (interpreter) {
elf_entry = load_elf_interp(interp_elf_ex,interpreter,load_bias, interp_elf_phdata,&arch_state);
...
} else {
elf_entry = e_entry;
...
}
...
}
根据上述代码所示,程序入口 elf_entry 的取值分以下两种情况:
- 需要载入解释器(有动态链接的依赖库):就通过
load_elf_interp载入解释器,并返回值(解释器的入口地址)赋值给elf_entry - 不需要载入解释器(静态链接依赖库):
elf_entry取值为当前 ELF 本身的入口地址
dynamic linker
当应用程序有依赖共享库时,程序启动时会进入 dynamic linker。
dynamic linker 位于 glibc 的代码中,执行时会经过如下函数调用到达 dl_main:
_dl_start(elf/rtld.c)_dl_start_final_dl_sysdep_startdl_main
dl_main 函数中跟 vDSO 初始化相关的有 setup_vdso 和 setup_vdso_pointers 两个函数调用。
setup_vdso 会初始化 vDSO 相关的数据结构,其中就包含 _dl_sysinfo_map,它在后面的 setup_vdso_pointers 中会用到。
// elf/setup-vdso.h
static inline void __attribute__ ((always_inline)) setup_vdso (struct link_map *main_map __attribute__ ((unused)), struct link_map ***first_preload __attribute__ ((unused)))
{
...
l->l_phdr = ((const void *) GLRO(dl_sysinfo_dso) + GLRO(dl_sysinfo_dso)->e_phoff);
l->l_phnum = GLRO(dl_sysinfo_dso)->e_phnum;
...
GLRO(dl_sysinfo_map) = l;
...
}
setup_vdso_pointers 用来初始化 vDSO 相关函数指针。
// sysdeps/unix/sysv/linux/dl-vdso-setup.h
/* Initialize the VDSO functions pointers. */
static inline void __attribute__ ((always_inline))
setup_vdso_pointers (void)
{
...
#ifdef HAVE_CLOCK_GETTIME64_VSYSCALL
GLRO(dl_vdso_clock_gettime64) = dl_vdso_vsym (HAVE_CLOCK_GETTIME64_VSYSCALL);
#endif
#ifdef HAVE_GETTIMEOFDAY_VSYSCALL
GLRO(dl_vdso_gettimeofday) = dl_vdso_vsym (HAVE_GETTIMEOFDAY_VSYSCALL);
#endif
#ifdef HAVE_CLOCK_GETRES64_VSYSCALL
GLRO(dl_vdso_clock_getres_time64) = dl_vdso_vsym (HAVE_CLOCK_GETRES64_VSYSCALL);
#endif
}
// string/test-string.h
#define GLRO(x) _##x
// sysdeps/unix/sysv/linux/riscv/sysdep.h
/* List of system calls which are supported as vsyscalls only
for RV64. */
GLRO 将变量名前加上下划线(例如 GLRO(dl_vdso_gettimeofday) 表示 _dl_vdso_gettimeofday),其变量类型是函数指针,具体定义如下:
// sysdeps/unix/sysv/linux/dl-vdso-setup.c
PROCINFO_CLASS int (*_dl_vdso_clock_gettime64) (clockid_t,
struct __timespec64 *) RELRO;
#endif
PROCINFO_CLASS int (*_dl_vdso_gettimeofday) (struct timeval *, void *) RELRO;
#endif
PROCINFO_CLASS int (*_dl_vdso_clock_getres_time64) (clockid_t,
struct __timespec64 *) RELRO;
dl_vdso_vsym 会根据 _dl_sysinfo_map 这个对象找到指定函数名在 vDSO 中的地址并返回。
// sysdeps/unix/sysv/linux/dl-vdso.h
/* Functions for resolving symbols in the VDSO link map. */
static inline void *
dl_vdso_vsym (const char *name)
{
struct link_map *map = GLRO (dl_sysinfo_map);
if (map == NULL)
return NULL;
/* Use a WEAK REF so we don't error out if the symbol is not found. */
ElfW (Sym) wsym = { 0 };
wsym.st_info = (unsigned char) ELFW (ST_INFO (STB_WEAK, STT_NOTYPE));
struct r_found_version rfv = { VDSO_NAME, VDSO_HASH, 1, NULL };
/* Search the scope of the vdso map. */
const ElfW (Sym) *ref = &wsym;
lookup_t result = GLRO (dl_lookup_symbol_x) (name, map, &ref,
map->l_local_scope,
&rfv, 0, 0, NULL);
return ref != NULL ? DL_SYMBOL_ADDRESS (result, ref) : NULL;
}
// include/link.h
/* Structure describing a loaded shared object. The `l_next' and `l_prev'
members form a chain of all the shared objects loaded at startup.
These data structures exist in space used by the run-time dynamic linker;
modifying them may have disastrous results.
This data structure might change in future, if necessary. User-level
programs must avoid defining objects of this type. */
struct link_map {...}
根据上面的 setup_vdso 函数代码可以看出,我们根据 _dl_sysinfo_dso 结构的信息对 _dl_sysinfo_map 结构进行初始化。
而 _dl_sysinfo_dso 的初始化函数由上至下依次调用路径如下:
_dl_start_final(elf/rtld.c)_dl_sysdep_start(sysdeps/unix/sysv/linux/dl-sysdep.c)_dl_sysdep_parse_arguments(sysdeps/unix/sysv/linux/dl-sysdep.c)_dl_parse_auxv(sysdeps/unix/sysv/linux/dl-parse-auxv.h)
在 _dl_sysdep_parse_arguments 函数中,找到辅助向量的位置并作为参数传递给 _dl_parse_auxv。
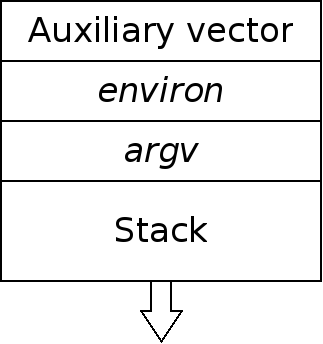 (图片源自 LWN.net)
(图片源自 LWN.net)
辅助向量在内存中的位置如上图所示,所以只要从栈顶开始,越过 argv(命令行参数)和 environ(环境变量)就能找到辅助向量的地址。
// sysdeps/unix/sysv/linux/dl-sysdep.c
static void _dl_sysdep_parse_arguments (void **start_argptr, struct dl_main_arguments *args)
{
_dl_argc = (intptr_t) *start_argptr;
_dl_argv = (char **) (start_argptr + 1); /* Necessary aliasing violation. */
_environ = _dl_argv + _dl_argc + 1;
for (char **tmp = _environ; ; ++tmp)
if (*tmp == NULL)
{
/* Another necessary aliasing violation. */
GLRO(dl_auxv) = (ElfW(auxv_t) *) (tmp + 1);
break;
}
dl_parse_auxv_t auxv_values = { 0, };
_dl_parse_auxv (GLRO(dl_auxv), auxv_values);
args->phdr = (const ElfW(Phdr) *) auxv_values[AT_PHDR];
args->phnum = auxv_values[AT_PHNUM];
args->user_entry = auxv_values[AT_ENTRY];
}
_dl_parse_auxv 函数将辅助向量的信息存储到 AUXV_VALUES 中,并初始化 GLRO 变量,这其中就包括 _dl_sysinfo_dso。
// sysdeps/unix/sysv/linux/dl-parse-auxv.h
typedef ElfW(Addr) dl_parse_auxv_t[AT_MINSIGSTKSZ + 1];
/* Copy the auxiliary vector into AUXV_VALUES and set up GLRO
variables. */
static inline void _dl_parse_auxv (ElfW(auxv_t) *av, dl_parse_auxv_t auxv_values)
{
...
for (; av->a_type != AT_NULL; av++)
if (av->a_type <= AT_MINSIGSTKSZ)
auxv_values[av->a_type] = av->a_un.a_val;
GLRO(dl_sysinfo_dso) = (void *) auxv_values[AT_SYSINFO_EHDR];
...
}
在 setup_vdso_pointers 函数里初始化的函数指针是 _dl_vdso_gettimeofday,它跟我们使用的 gettimeofday 又有什么关系?
// sysdeps/unix/sysv/linux/gettimeofday.c
int __gettimeofday (struct timeval *restrict tv, void *restrict tz)
{
if (__glibc_unlikely (tz != 0))
memset (tz, 0, sizeof *tz);
return INLINE_VSYSCALL (gettimeofday, 2, tv, tz);
}
weak_alias (__gettimeofday, gettimeofday)
gettimeofday 实际是 __gettimeofday 的别名,而 __gettimeofday 内部实际调用的是 INLINE_VSYSCALL。
// sysdeps/unix/sysv/linux/sysdep-vdso.h
funcptr (args)
#define INLINE_VSYSCALL(name, nr, args...) \
({ \
__label__ out; \
__label__ iserr; \
long int sc_ret; \
\
__typeof (GLRO(dl_vdso_##name)) vdsop = GLRO(dl_vdso_##name); \
if (vdsop != NULL) \
{ \
sc_ret = INTERNAL_VSYSCALL_CALL (vdsop, nr, ##args); \
if (!INTERNAL_SYSCALL_ERROR_P (sc_ret)) \
goto out; \
if (INTERNAL_SYSCALL_ERRNO (sc_ret) != ENOSYS) \
goto iserr; \
} \
\
sc_ret = INTERNAL_SYSCALL_CALL (name, ##args); \
if (INTERNAL_SYSCALL_ERROR_P (sc_ret)) \
{ \
iserr: \
__set_errno (INTERNAL_SYSCALL_ERRNO (sc_ret)); \
sc_ret = -1L; \
} \
out: \
sc_ret; \
})
从上面的宏定义可以看出,INLINE_VSYSCALL (gettimeofday, 2, tv, tz) 实际上是执行 _dl_vdso_gettimeofday(tv, tz)。而 _dl_vdso_gettimeofday 就是 setup_vdso_pointers 里初始化的函数指针。
libc init
而对那些静态链接的程序来说,虽然不会执行上述 dynamic linker,但会在应用程序开始部分进行类似的初始化过程。而初始化的关键在于,从辅助向量中找到 vDSO 地址并初始化对应的函数指针。
大致的初始化过程如下:
ENTRY_POINT/_start(sysdeps/riscv/start.S)__libc_start_main@pltLIBC_START_MAIN/__libc_start_main_impl(csu/libc-start.c)_dl_aux_init(elf/dl-support.c)_dl_parse_auxv(sysdeps/unix/sysv/linux/dl-parse_auxv.h)
__libc_init_first(csu/init-first.c)_dl_non_dynamic_init(elf/dl-support.c)setup_vdsosetup_vdso_pointers
从上面的调用过程可以看出,最终也是通过执行 _dl_parse_auxv,setup_vdso,setup_vdso_pointers 这几个关键函数进行 vDSO 的初始化。
至此 vDSO 的初始化部分就完成了。先小结一下,经过上述过程的初始化,目前准备就绪的有:
- vDSO 的代码和数据均在用户内存中完成映射
- 用户内存中的加速系统调用的函数指针已经指向 vDSO
- 内核中可以使用
vdso_data对象访问 vDSO 数据部分 - 用户态中可以使用
_vdso_data对象访问 vDSO 数据部分(这部分会在下文中阐述)
vDSO Read & Write
vDSO 初始化完成后,就可以对其数据部分进行读写操作了。
read
当用户程序需要读取系统时间的时候,一般会调用 glibc 中提供的 gettimeofday 方法,该方法会通过上一节中设置好的相关变量,找到 vDSO 中对应函数 __vdso_gettimeofday 并执行调用。
// arch/riscv/kernel/vdso/vgettimeofday.c
int __vdso_gettimeofday(struct __kernel_old_timeval *tv, struct timezone *tz)
{
return __cvdso_gettimeofday(tv, tz);
}
// lib/vdso/gettimeofday.c
static __maybe_unused int
__cvdso_gettimeofday(struct __kernel_old_timeval *tv, struct timezone *tz)
{
return __cvdso_gettimeofday_data(__arch_get_vdso_data(), tv, tz);
}
__vdso_gettimeofday 函数直接调用了 __cvdso_gettimeofday,__cvdso_gettimeofday 里面涉及两个函数:
__arch_get_vdso_data:获取 vDSO 数据部分地址__cvdso_gettimeofday_data:获取系统时间具体逻辑
__arch_get_vdso_data
// arch/riscv/include/asm/vdso/gettimeofday.h
static __always_inline const struct vdso_data *__arch_get_vdso_data(void)
{
return _vdso_data;
}
__arch_get_vdso_data 里面直接返回 _vdso_data 变量,说明该变量存储的是用户态中 vDSO 数据部分内存地址。那它是如何初始化的呢?
// arch/riscv/kernel/vdso/vdso.lds.S
PROVIDE(_vdso_data = . - __VVAR_PAGES * PAGE_SIZE);
// arch/riscv/include/asm/vdso.h
#define __VVAR_PAGES 2
// arch/riscv/include/asm/page.h
#define PAGE_SHIFT (12)
#define PAGE_SIZE (_AC(1, UL) << PAGE_SHIFT)
首先,在本文 Build 章节中提到,vdso.lds.S 用于生成 vdso.so.dbg 共享库文件,这个链接脚本里对 _vdso_data 进行了初始化,具体赋值成了 - 2 * 4096。这个值可以通过查看 vdso.so.dbg 库文件进行验证:
$ readelf -s /labs/linux-lab/build/riscv64/virt/linux/v5.17/arch/riscv/kernel/vdso/vdso.so.dbg | grep _vdso_data
19: ffffffffffffe000 0 NOTYPE LOCAL DEFAULT 1 _vdso_data
我们知道共享库加载进内存后需要进行地址重定位,操作系统通过上文提到的 setup_vdso 对 vDSO 执行重定位。
// elf/setup-vdso.h
static inline void __attribute__ ((always_inline))
setup_vdso (struct link_map *main_map __attribute__ ((unused)), struct link_map ***first_preload __attribute__ ((unused)))
{
...
l->l_map_start = (ElfW(Addr)) GLRO(dl_sysinfo_dso);
...
}
从上面的代码来看,重定位的起始地址被赋值成了 _dl_sysinfo_dso。而根据本文之前的描述,_dl_sysinfo_dso 在用户进程启动时会初始化为 vDSO 代码部分的起始地址,所以重定向后的 _vdso_data = _dl_sysinfo_dso - __VVAR_PAGES * PAGE_SIZE。而 vDSO 数据部分正好位于代码部分之前,所以 _vdso_data 就被初始化为 vDSO 数据部分起始地址。
__cvdso_gettimeofday_data
__cvdso_gettimeofday_data 函数实现逻辑主要分两部分:
- 优先调用
do_hres函数从_vdso_data中获取系统时间 - 如果
do_hres返回失败,则调用gettimeofday_fallback执行系统调用
// lib/vdso/gettimeofday.c
static __maybe_unused int
__cvdso_gettimeofday_data(const struct vdso_data *vd,
struct __kernel_old_timeval *tv, struct timezone *tz)
{
if (likely(tv != NULL)) {
struct __kernel_timespec ts;
if (do_hres(&vd[CS_HRES_COARSE], CLOCK_REALTIME, &ts))
return gettimeofday_fallback(tv, tz);
tv->tv_sec = ts.tv_sec;
tv->tv_usec = (u32)ts.tv_nsec / NSEC_PER_USEC;
}
...
}
static __always_inline int do_hres(const struct vdso_data *vd, clockid_t clk, struct __kernel_timespec *ts)
{
const struct vdso_timestamp *vdso_ts = &vd->basetime[clk];
...
ns = vdso_ts->nsec;
sec = vdso_ts->sec;
...
ts->tv_sec = sec + __iter_div_u64_rem(ns, NSEC_PER_SEC, &ns);
ts->tv_nsec = ns;
return 0;
}
// arch/riscv/include/asm/vdso/gettimeofday.h
static __always_inline
int gettimeofday_fallback(struct __kernel_old_timeval *_tv,
struct timezone *_tz)
{
register struct __kernel_old_timeval *tv asm("a0") = _tv;
register struct timezone *tz asm("a1") = _tz;
register long ret asm("a0");
register long nr asm("a7") = __NR_gettimeofday;
asm volatile ("ecall\n"
: "=r" (ret)
: "r"(tv), "r"(tz), "r"(nr)
: "memory");
return ret;
}
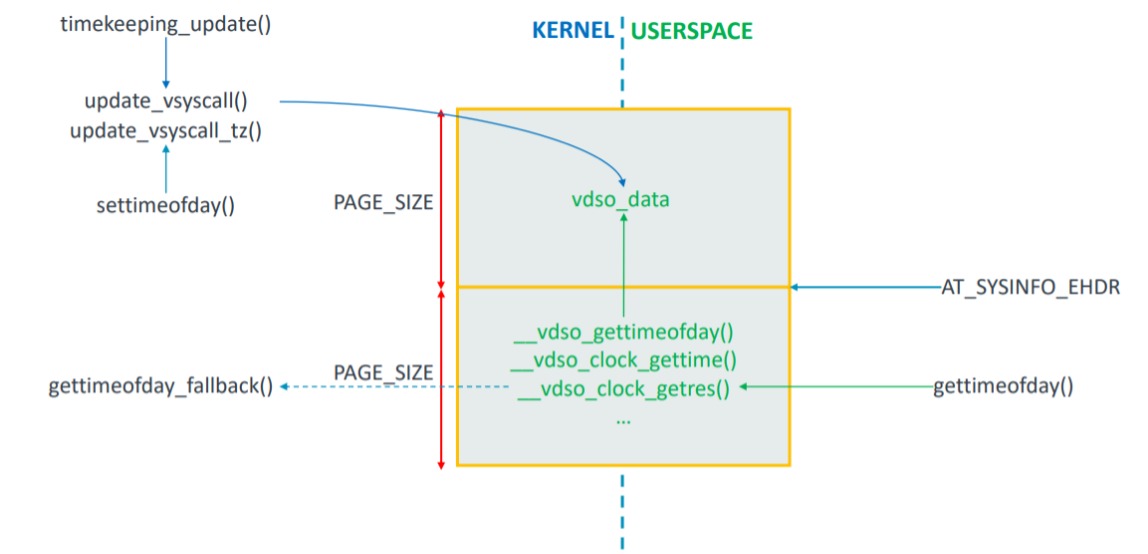
write
vDSO 数据部分的更新按照触发的方式可以分为以下两种情况:
- 时钟中断时更新(timekeeping_update)
- 应用程序主动触发(settimeofday)
timekeeping_update
当发生时钟中断时,中断处理程序会调用 timekeeping_update,进一步调用 update_vsyscall 来更新 vDSO 中系统时间信息。
// kernel/time/timekeeping.c
static void timekeeping_update(struct timekeeper *tk, unsigned int action)
{
...
update_vsyscall(tk);
...
}
update_vsyscall 函数里通过调用 __arch_get_k_vdso_data 获取内核中 vDSO 数据对象。
// kernel/time/vsyscall.c
void update_vsyscall(struct timekeeper *tk)
{
struct vdso_data *vdata = __arch_get_k_vdso_data();
struct vdso_timestamp *vdso_ts;
s32 clock_mode;
u64 nsec;
/* copy vsyscall data */
vdso_write_begin(vdata);
clock_mode = tk->tkr_mono.clock->vdso_clock_mode;
vdata[CS_HRES_COARSE].clock_mode = clock_mode;
vdata[CS_RAW].clock_mode = clock_mode;
/* CLOCK_REALTIME also required for time() */
vdso_ts = &vdata[CS_HRES_COARSE].basetime[CLOCK_REALTIME];
vdso_ts->sec = tk->xtime_sec;
vdso_ts->nsec = tk->tkr_mono.xtime_nsec;
/* CLOCK_REALTIME_COARSE */
vdso_ts = &vdata[CS_HRES_COARSE].basetime[CLOCK_REALTIME_COARSE];
vdso_ts->sec = tk->xtime_sec;
vdso_ts->nsec = tk->tkr_mono.xtime_nsec >> tk->tkr_mono.shift;
/* CLOCK_MONOTONIC_COARSE */
vdso_ts = &vdata[CS_HRES_COARSE].basetime[CLOCK_MONOTONIC_COARSE];
vdso_ts->sec = tk->xtime_sec + tk->wall_to_monotonic.tv_sec;
nsec = tk->tkr_mono.xtime_nsec >> tk->tkr_mono.shift;
nsec = nsec + tk->wall_to_monotonic.tv_nsec;
vdso_ts->sec += __iter_div_u64_rem(nsec, NSEC_PER_SEC, &vdso_ts->nsec);
/*
* Read without the seqlock held by clock_getres().
* Note: No need to have a second copy.
*/
WRITE_ONCE(vdata[CS_HRES_COARSE].hrtimer_res, hrtimer_resolution);
/*
* If the current clocksource is not VDSO capable, then spare the
* update of the high resolution parts.
*/
if (clock_mode != VDSO_CLOCKMODE_NONE)
update_vdso_data(vdata, tk);
__arch_update_vsyscall(vdata, tk);
vdso_write_end(vdata);
__arch_sync_vdso_data(vdata);
}
__arch_get_k_vdso_data 实际返回的是 vdso_data 对象。
// arch/riscv/include/asm/vdso/vsyscall.h
/*
* Update the vDSO data page to keep in sync with kernel timekeeping.
*/
static __always_inline struct vdso_data *__riscv_get_k_vdso_data(void)
{
return vdso_data;
}
#define __arch_get_k_vdso_data __riscv_get_k_vdso_data
// arch/riscv/kernel/vdso.c
static union {
struct vdso_data data;
u8 page[PAGE_SIZE];
} vdso_data_store __page_aligned_data;
struct vdso_data *vdso_data = &vdso_data_store.data;
settimeofday
settimeofday 系统调用执行过程中会调用 update_vsyscall_tz 更新 vDSO 的数据。
// kernel/time/vsyscall.c
void update_vsyscall_tz(void)
{
struct vdso_data *vdata = __arch_get_k_vdso_data();
vdata[CS_HRES_COARSE].tz_minuteswest = sys_tz.tz_minuteswest;
vdata[CS_HRES_COARSE].tz_dsttime = sys_tz.tz_dsttime;
__arch_sync_vdso_data(vdata);
}
update_vsyscall_tz 和 update_vsyscall 类似,都是通过调用 __arch_get_k_vdso_data 获取内核中 vDSO 数据对象并进行更新。
总结
本文依据 Linux 和 glibc 源代码,先从编译期解释了 vDSO 共享库如何集成到 Linux 操作系统内核,然后从运行期解释了 vDSO 相关数据结构的初始化,最后分析了用户程序读取 vDSO 数据和内核更新数据的过程。希望能帮助读者理解 vDSO 技术的实现原理。
参考资料
猜你喜欢:
- 我要投稿:发表原创技术文章,收获福利、挚友与行业影响力
- 知识星球:独家 Linux 实战经验与技巧,订阅「Linux知识星球」
- 视频频道:泰晓学院,B 站,发布各类 Linux 视频课
- 开源小店:欢迎光临泰晓科技自营店,购物支持泰晓原创
- 技术交流:Linux 用户技术交流微信群,联系微信号:tinylab
| 支付宝打赏 ¥9.68元 | 微信打赏 ¥9.68元 | |
 |  请作者喝杯咖啡吧 |  |
Read Album:
- Stratovirt 的 RISC-V 虚拟化支持(六):PLIC 和 串口支持
- Stratovirt 的 RISC-V 虚拟化支持(五):BootLoader 和设备树
- Stratovirt 的 RISC-V 虚拟化支持(四):内存模型和 CPU 模型
- Stratovirt 的 RISC-V 虚拟化支持(三):KVM 模型
- Stratovirt 的 RISC-V 虚拟化支持(二):库的 RISC-V 适配

{kind=link}