

[置顶] 泰晓 RISC-V 实验箱,配套 30+ 讲嵌入式 Linux 系统开发公开课
自上而下分析 Linux 设备模型
Liu Lichao 创作于 2020/11/04
By 法海 of TinyLab.org Sep 29, 2020
概述
Linux 驱动开发同学入门时最常见的例子就是“字符设备”驱动。几个简单的 API 就能在 Linux 系统中创建字符设备,在 /dev 目录中创建设备节点。
实例:
//注册字符设备,主设备号为 MEM_MAJOR,对应的操作函数为 memory_fops
register_chrdev(MEM_MAJOR, "mem", &memory_fops);
//创建 class
mem_class = class_create(THIS_MODULE, "mem");
//创建设备
device_create(mem_class, NULL, MKDEV(MEM_MAJOR, 0), NULL, “mem”);
改编自:drivers/char/mem.c
上面 API 函数的背后的原理是什么?本篇文章通过分析 Linux 内核设备模型揭示设备管理的本质。
字符设备的本质
基于 Linux 下一切皆文件的设计理念,驱动设备也需要有对应的文件节点,在 Linux 系统中设备类型分为字符设备和块设备两类。
字符设备文件有两个要素:设备号、file_operations。其中,设备号是字符设备文件在系统中的唯一标识,file_operations 对应设备文件各种操作方法。
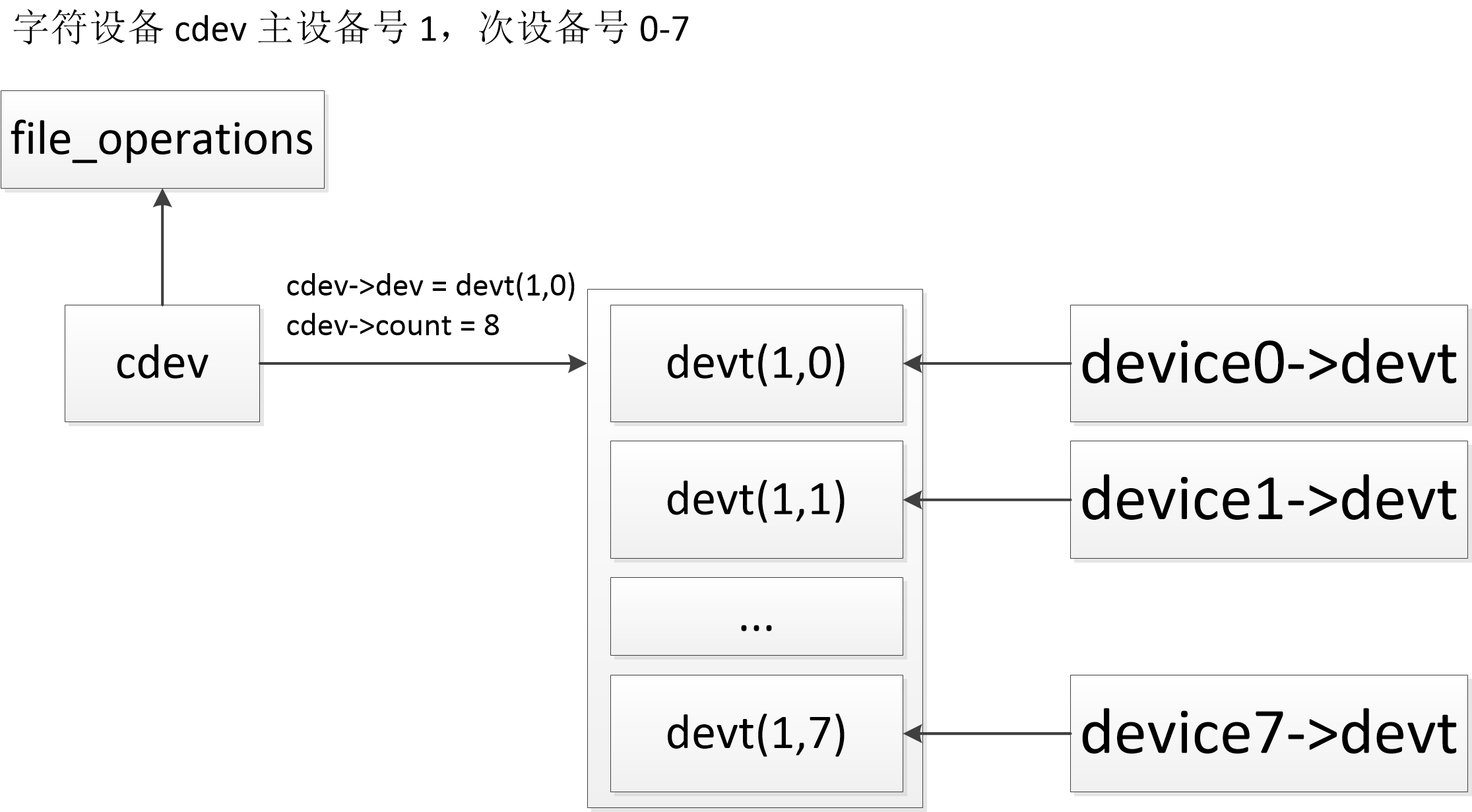
表示字符设备的数据结构 struct cdev 就是上述两个要素的超集:
struct cdev {
...
const struct file_operations *ops; ---file_operations
dev_t dev; --- 字符设备的起始设备号
unsigned int count; --- 子设备号个数
} __randomize_layout;
注意:struct cdev 与设备号的关系是一对多,cdev.dev 表示字符设备启动设备号,cdev.count 表示子设备号的个数。而 struct device 与设备号的关系是一对一。
比如,当系统插入多个键盘时,他们的底层操作方法相同,没必要创建多个 struct cdev,但是他们确实存在多个实例。所以,需要创建多个 struct device。这种场景可以把 struct cdev 看成 struct device 实例的代理。
cdev 与 device 的关系如下图所示:
字符设备注册完成后,系统知道了某段设备号范围内对应的设备的操作方法,但是设备还没有创建。
创建设备的工作通过 device_create 完成。
创建设备(device_create)需要完成哪些工作:
- 分配
struct device结构,并初始化,特别是初始化设备号 - 基于 class/parent 信息,在 sysfs 文件系统创建对应目录及属性文件
创建设备节点
两个途径:1)基于 devtmpfs;2)基于向用户态发送 uevent 信息,udev 程序根据 uevent 信息创建设备节点
- 如果设备有所属的 bus,尝试 probe
很平常的功能,它的复杂性主要体现在数据结构的抽象。
数据结构设计:
kobject
它是设备模型的基类,可以感性理解为内核中的基本对象。一般被更高级的数据结构包含,比如 device/driver 等。
kobject 实现引用计数,sysfs 导出等功能。
kset
它是 kobject 的集合,同时一个 kset 也是内核对象,所以它也是一个 kobject。
kset 实现聚合同类 kobject 功能。
ktype
相同属性的 kobject 拥有相同的 ktype。
为相同 type 的 kobject 提供操作函数(比如 release),为相同 type 的 kobject 定义相同的 sysfs 属性文件。
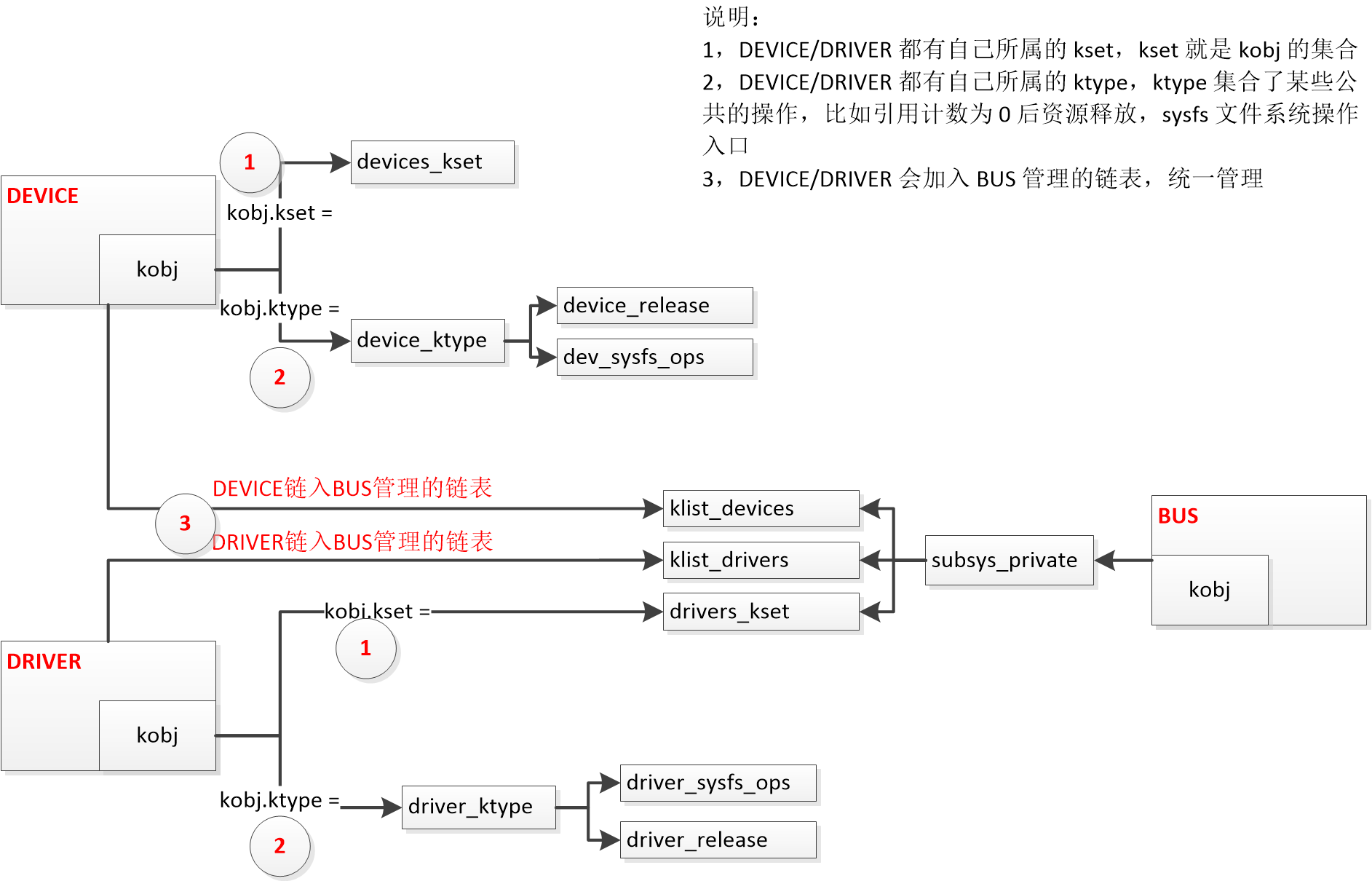
图解 kobject/kset/ktype
场景
上述概念很抽象,所以要在场景中学习。
设备引用计数实现
get_device 实现增加某个 device 的引用计数功能。其底层是通过 kobject 实现的。
get_device
-> kobject_get
--> kref_get
---> kref.refcount 加 1
kobject.kref.refcount 的数值直接代表了 device 的引用计数。
device 资源释放
put_device 表示减少某个 device 的引用计数。
put_device
-> kobject_put
--> kref_put
---> kref.refcount 减 1
----> if (0 == refcount)
调用 release 接口
release 函数指针是 kobject_release。
kobject_releae
-> kobject_cleanup
--> kobject_del //delete sysfs entry
---> ktype->release //执行 kobject.ktype.release 函数,此处对应 device_release, device_release 完成 device 层的资源释放,同时检查 device 所属 device_type/class 是否有需要释放的资源
sysfs_ops 操作
一个 kobject 对应 sysfs 的一个目录,kobject API 实现中天然包含与 sysfs 文件系统的同步。自然而然,包含 kobject 的高级数据结构也会在 sysfs 中暴露自己的数据。比如 struct device 包含 struct kobject,所以在 sysfs 文件系统中有一个目录对应此 struct device, 而目录下的文件属于此 struct kobject 的属性文件。
创建 device 的过程如下:
device_create
-> device_add
--> kobject_add //kobject_add 调用 create_dir 创建目录
---> device_create_file //在 kobject_add 好的 dir 中创建设备属性文件
读写这些属性文件需要依赖文件所属的 kobject.ktype.sysfs_ops 函数接口集。
sysfs 文件操作进阶阅读:
kset 集合
图解 kobject/kset/ktype 中可以看到 device/driver 都属于某个 kset,kset 自身也是一个内核对象,所以它也是一个 kobject。所以,它在 sysfs 文件系统中也表现为一个目录。
本文开篇字符设备示例代码创建了 mem class,class 就是归类的意思,同一类设备属于同一个 class。比如有很多设备属于 mem class,它们的 kobj.kset = mem_class.kset。
实例:
sys/class/mem 目录就是 mem class。有一些其它 kobject(device) 属于此 class(即, kset)。
/sys/class/mem # ls
full kmsg null random zero
kmem mem port urandom
中场总结
通过上述描述,我们知道了 struct cdev,struct device 在内核中的角色位置,也知道了设备模型的基本数据结构。
但是,设备管理还有一个问题:设备与驱动如何匹配?
下面我们着重分析这个问题。
驱动与设备
驱动开发三部曲
- 根据硬件修改 dts 文件
- 配置内核选中对应驱动,或新增内核驱动模块
- 编译测试
这背后的本质是什么?
常见概念
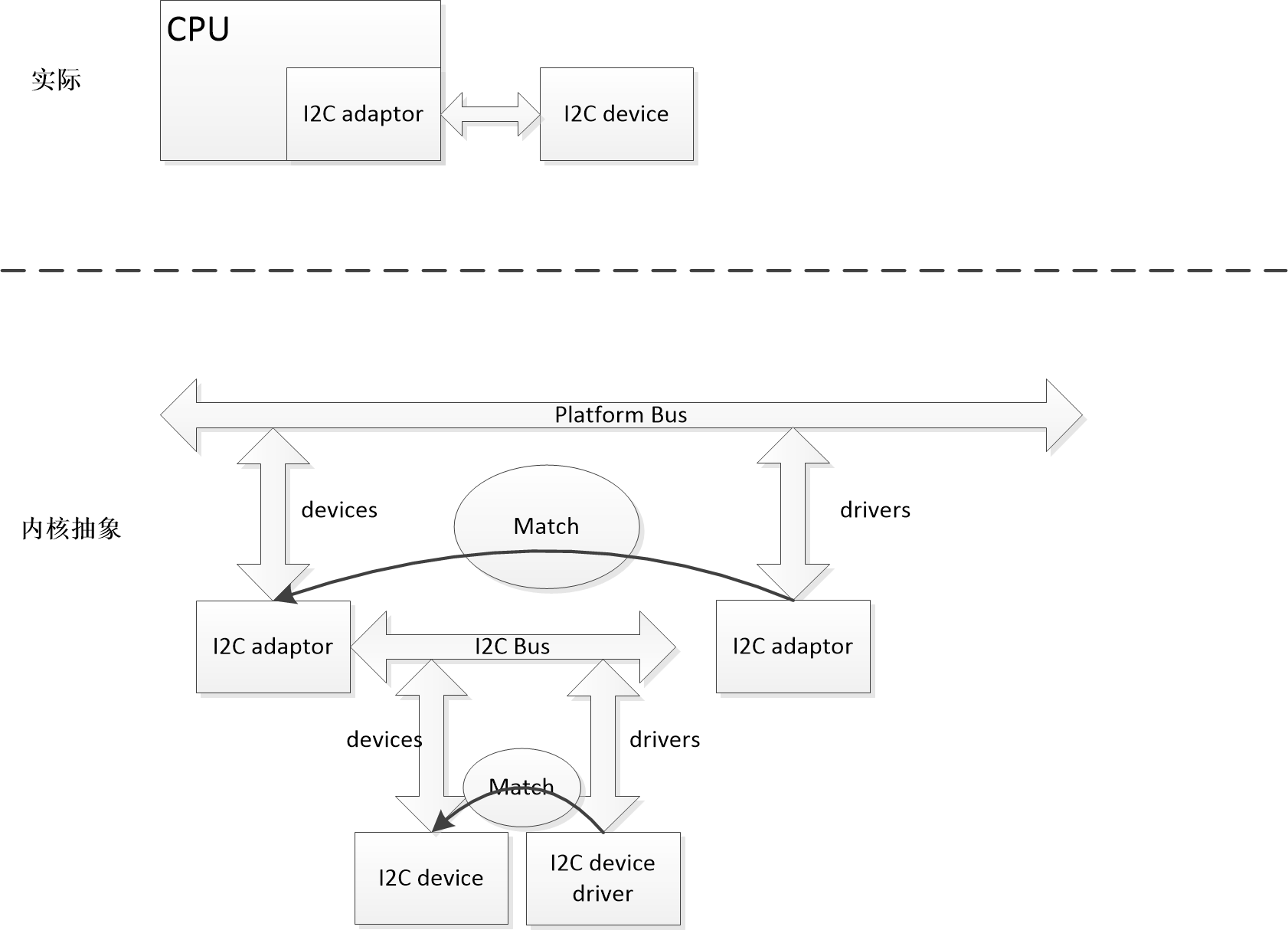
总线、驱动、设备在现实世界中存在。比如 PCIE 总线,USB 总线,I2C 总线。 内核中都有其对应的抽象实现。比如 pci_bus_type, usb_bus_type。
随着 SOC 的流行,一颗 CPU 集成多个控制器,控制器地址固定,于是内核抽象出了 platform 总线来挂载 SOC 内部的各类控制器。
简单图示:
分层结构:
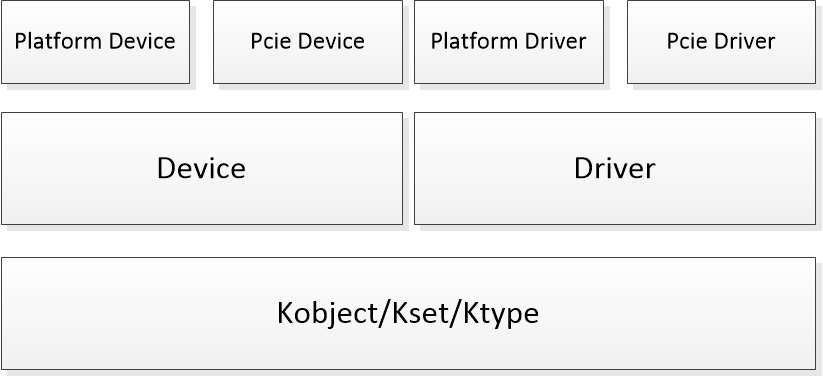
上面的分层结构设计主要还是基于面向对象的思想,提取最大相同元素为底层数据结构。
实例解析
platform bus 注册
总线作为管理媒介,必须先注册。platform_bus 在 platform_bus_init 函数中注册。
platform_bus_init
-> device_register(&platform_bus)
-> bus_register(&platform_bus_type)
注:上面的 platform_bus 是一个 device,platform_bus_type 才是真正的 bus。
可以看到先注册 platform_bus 设备,再注册 platform bus(platform_bus_type)。 其中 platform_bus 设备对应 /sys/devices/platform 目录,作为所有 platform_device 的父设备。
Bus 的本质:
- 父亲。
platform_bus 设备表示所有 platform device 的父设备。
- 桥梁。
platform_bus_type 承担 platform_bus 总线下设备与驱动的匹配工作。
platform device 注册
dts 描述设备硬件组成,被编译成内核可识别的二进制文件。系统启动初期,解析设备树,将设备树描述的设备注册到系统,调用栈如下:
[ 0.768872] [<ffffffff807dc558>] of_device_add+0x58/0x78
[ 0.774181] [<ffffffff807dca9c>] of_platform_device_create_pdata+0x8c/0xa8
[ 0.781056] [<ffffffff807dcbb8>] of_platform_bus_create+0x100/0x1c8
[ 0.787322] [<ffffffff807dccf8>] of_platform_populate+0x78/0xd8
[ 0.793242] [<ffffffff80200498>] do_one_initcall+0x98/0x1c0
重要信息:
- 这里注册的 platform_device 都属于 platform bus
of_platform_device_create_pdata -> platform_device->dev.bus = &platform_bus_type; - 这里注册的 platform_device 会加入到 platform bus 下的设备链表中
of_device_add -> device_add --> bus_add_device ---> klist_add_tail(&dev->p->knode_bus, &bus->p->klist_devices)
platform driver 注册
driver 的注册都在具体的驱动模块中实现。只需要一个 platform_driver_register API 函数。
platform_driver_register(&at91_twi_driver);
重要信息:
- 驱动注册后,驱动信息会加入到 platform bus 下的驱动链表中
驱动初始化
设备/驱动均已注册,现在万事具备,只欠东风。谁来调用驱动初始化函数?
驱动最重要的函数是 probe,调用流程如下:
[ 1.343296] [<ffffffff807c0168>] ls_i2c_probe+0x38/0x440
[ 1.348604] [<ffffffff804fa848>] driver_probe_device+0xc8/0x270
[ 1.354528] [<ffffffff804f853c>] bus_for_each_drv+0x64/0xc8
[ 1.360091] [<ffffffff804fac0c>] device_attach+0xac/0xd0
[ 1.365410] [<ffffffff804f8b88>] bus_probe_device+0xa0/0xe0
[ 1.370975] [<ffffffff804f7a2c>] device_add+0x554/0x7c0
[ 1.376197] [<ffffffff807dcaac>] of_platform_device_create_pdata+0x8c/0xa8
[ 1.383071] [<ffffffff807dcbc8>] of_platform_bus_create+0x100/0x1c8
[ 1.389338] [<ffffffff807dcc28>] of_platform_bus_create+0x160/0x1c8
[ 1.395604] [<ffffffff807dcd08>] of_platform_populate+0x78/0xd8
[ 1.401522] [<ffffffff80200498>] do_one_initcall+0x98/0x1c0
可见驱动初始化流程被融合到了设备/驱动注册流程中。
上面的例子是注册设备完成后,通过 device_attach 函数扫描总线上注册的驱动是否与当前设备匹配,如果匹配就执行驱动初始化函数。
还有一种情况是注册驱动完成后,通过 driver_attach 函数扫描总线上注册的设备是否与当前驱动匹配,如果匹配就执行驱动初始化函数。
Bus 桥梁作用的体现:
集合:
bus->p->klist_devices 收集总线下设备。
bus->p->klist_drivers 收集总线下驱动。
匹配:
bus->match 函数会检查设备与驱动是否匹配,不同总线判断方法不同。比如 PCIE 总线是判断 PCIE 设备的 ID 与 PCIE 驱动支持的 id_table 是否匹配,platform 总线是判断 platform_device 的 compatible 字段是否与 platform_driver 的 compatible 匹配。
总结
至此,我们看到了设备的本质,设备通过设备号在系统中标识唯一的自己,通过设备号与字符设备数据结构关联,字符设备提供文件操作函数。
在驱动开发中,内核基于硬件世界的概念,抽象出了总线/设备/驱动的概念,设备/驱动都依附在总线上,设备注册或驱动注册完成后主动检查现存的驱动/设备与自己是否匹配,如果匹配就执行驱动的初始化函数。
驱动与设备都是拟人化的概念,在其背后还有 kobj/kset/ktype 等基础数据结构,实现了某些公共功能的抽象,比如引用计数,资源释放等。
设备管理细节很多,不是几篇文章可以涵盖住的,因为解析代码太没意思了,本篇文章主要目的是把设备管理背后的 kobj/kset/ktype 引出来,再稍微说一下设备/驱动 API 背后的原理。希望能对初学者做出方向指导。
猜你喜欢:
- 我要投稿:发表原创技术文章,收获福利、挚友与行业影响力
- 知识星球:独家 Linux 实战经验与技巧,订阅「Linux知识星球」
- 视频频道:泰晓学院,B 站,发布各类 Linux 视频课
- 开源小店:欢迎光临泰晓科技自营店,购物支持泰晓原创
- 技术交流:Linux 用户技术交流微信群,联系微信号:tinylab
| 支付宝打赏 ¥9.68元 | 微信打赏 | |
 |  请作者喝杯咖啡吧 |  |
