

[置顶] 泰晓 RISC-V 实验箱,配套 30+ 讲嵌入式 Linux 系统开发公开课
RISC-V CPU 设计(6): RV64I CPU 控制器模块设计思路与实现
BossWangST 创作于 2023/08/23
Corrector: TinyCorrect v0.1-rc3 - [spaces newline header] Author: Fajie.WangNiXi YuHaoW1226@163.com Date: 2022/08/16 Revisor: Falcon falcon@tinylab.org Project: RISC-V Linux 内核剖析 Proposal: RISC-V CPU Design Sponsor: PLCT Lab, ISCAS
前言
在 CPU 设计的主要模块中,控制器的作用至关重要,控制器的输入是取指令模块的 32 位 RV64I 指令,输出是各个控制信号。本文将对 RV64I CPU 的控制器模块设计思路以及实现步骤进行介绍。
控制器的设计思路
既然控制器的输入端是指令,输出端是控制信号。那么设计控制器的出发点就在于研读 RISC-V 指令集手册中对指令编码的规定,寻找其中的规律,从而将二进制指令译码获取控制信号。
RV64I 指令格式
在 系列的第一篇文章 中已经详细介绍了 RV32I 指令集,而在 RV64I 指令集中,其格式与 RV32I 基本相同。两者的差异在于 RV64I 增加了许多将结果截断成 32 位的指令,即编码会更多。RV64I 的指令格式仍然是以下 6 种:
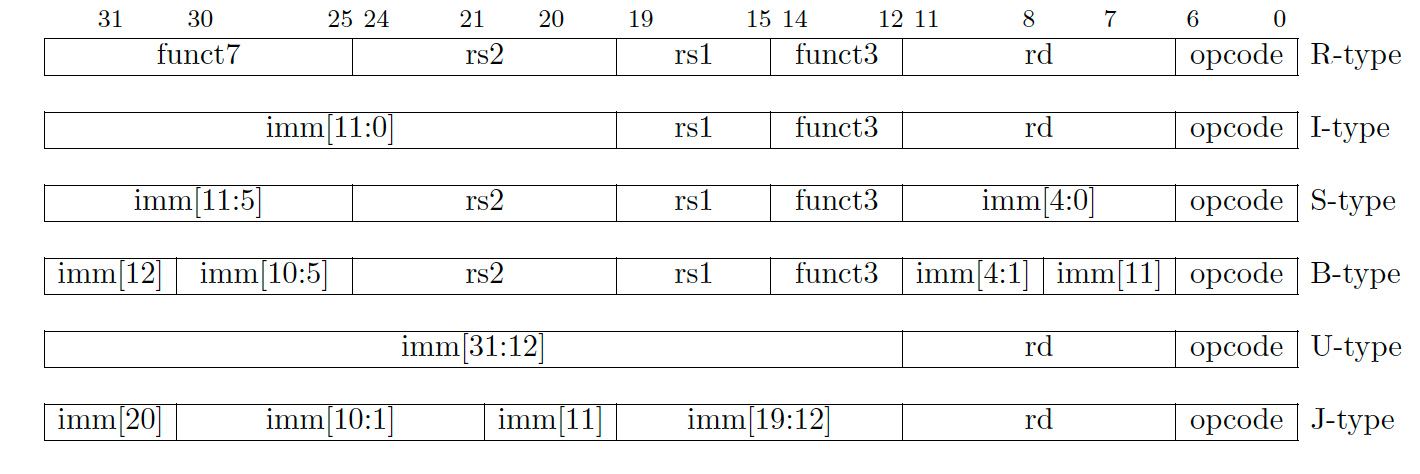
从图中可以看出,RISC-V 指令译码阶段时的优势:表示寄存器编号的位置恒定,从而可以边译码边读取寄存器。同时,所有指令格式的末 7 位(inst[6:0])固定为 opcode 字段,保证控制器可以直接区分不同指令所要进行的操作。
由此,控制器的大体框架就可以设计出来,首先将各个指令格式中的字段进行提取,接着根据 opcode 对指令功能进行分类,若有更细一步的划分(如 funct3 和 funct7 字段)则继续在类内区分,最后进行控制信号的赋值操作。于是可以写出如下的框架代码:
val funct7 = io.instruction(31 downto 25)
val rs2 = io.instruction(24 downto 20)
val rs1 = io.instruction(19 downto 15)
val funct3 = io.instruction(14 downto 12)
val rd = io.instruction(11 downto 7)
val opcode = io.instruction(6 downto 0)
// for I-type
val immediate = UInt(64 bits)
immediate := U(io.instruction(31), 52 bits) @@ io.instruction(31 downto 20)
// for S-type
val store_immediate = io.instruction(31 downto 25) @@ io.instruction(11 downto 7)
// for LUI & AUIPC
val U_immediate = io.instruction(31 downto 12)
switch(opcode) {
default {
// 控制信号赋值
}
is(...) {
}
is(...){
}
}
opcode 字段译码
从上面的介绍中可以看出,opcode 字段是区分指令格式的重要字段,而查阅 RISC-V 手册,opcode 字段定义如下:
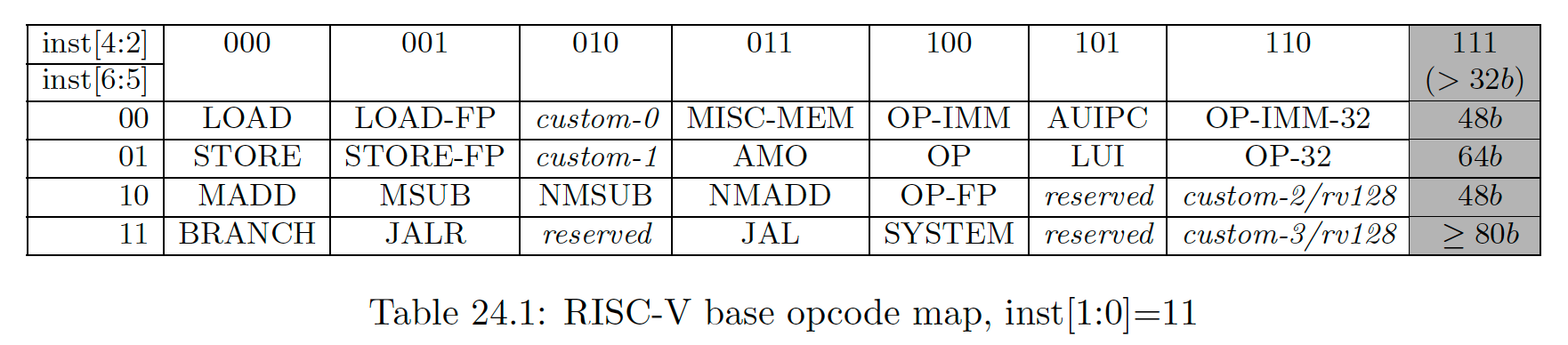
图中是 RV64G 的主要 opcode 映射表。这里对 RV64G 进行说明:
- 对于 RISC-V 项目而言,其目标之一就是可以成为稳定的软件开发目标平台。为此 RISC-V 定义了一个组合指令集架构:基本 ISA(RV32I 或 RV64I)外加上标准扩展模块(IMAFD,Zicsr,Zifencei),作为一个通用目标的 ISA,所以这里使用了缩写 G 表示这一包含了 3 个标准扩展模块的 ISA
- RV64G 的各个扩展功能如下
- M - 整数乘法和除法
- A - 原子指令
- F - 单精度浮点
- D - 双精度浮点
- Zicsr - CSRs 原子 RMW 操作扩展
- Zifencei - fence.i 内存访问指令
- Zicsr:
- 此扩展模块要求实现原子性的 CSR 寄存器读写指令,也是实现 RISC-V 特权指令集的基本扩展模块
- Zifencei:
- 此扩展模块定义了 fence 相关指令,其作用是对外部可见的访存请求,如设备 I/O 访问,内存访问等进行串行化。外部可见是指对处理器的其他核心、线程,外部设备或协处理器可见
- 目前 Zifencei 扩展仅包括了 FENCE.I 指令,该指令提供了同一个 hart 中写指令内存空间和读指令内存空间之间的显式同步,具体来说就是读取的指令总是最新写入的指令
- 该指令目前是确保指令内存存储和读取都对 hart 可见的唯一标准机制
根据表中的内容,结合手册就可以确定 RV64I 每一个 opcode 字段所对应的指令格式,从而对上一小节框架中 switch 结构进行完善,得到如下的代码:
switch(opcode) {
default {
// 控制信号赋值
}
is(U"00_000_11") {
// LOAD
is(U"00_100_11") {
// OP-IMM
}
is(U"00_110_11") {
// OP-IMM-32
}
is(U"01_000_11") {
// STORE
}
is(U"01_100_11") {
// OP
}
is(U"01_101_11") {
// LUI
}
is(U"00_101_11") {
// AUIPC
}
is(U"01_110_11") {
// OP-32
}
is(U"11_000_11") {
// BRANCH
}
is(U"11_001_11") {
// JALR
}
is(U"11_011_11") {
// JAL
}
}
结合指令执行流程确定基本控制信号
在控制器的框架搭建完毕后,下一步就是确定究竟要输出哪些控制信号。这时候就需要关注每条指令的执行流程,根据指令执行中经过的模块,确定控制信号的选取。在此过程中,我们可以根据不同指令格式对控制信号进行确定。
R 型指令
下面以一条 ADD 指令为例进行说明:
首先考虑 ADD 指令的功能,其将 rs1 寄存器中的值和 rs2 寄存器中的值相加,结果送至 rd 寄存器中。从描述中,可以得到以下的结论:
- 若要执行加法操作,则必须从寄存器堆中读取 2 个寄存器的值
- 加法操作是在 ALU 中完成
- 加法的结果将写入寄存器堆
所以,ADD 指令执行过程中,涉及的主要模块就是寄存器堆和 ALU。接下来考虑两个模块所需的控制信号:
- 寄存器堆:寄存器堆模块在设计时便要求有一个写入使能信号,而对于读取操作则是没有任何限制。所以,加法的结果写入寄存器堆时,需要将写入使能信号置位
- ALU:ALU 的功能是算术逻辑运算,在 ADD 指令中,ALU 的主要功能就是加法运算,故需要给 ALU 加法运算的信号;同时,考虑到 I 型指令中,送入 ALU 的 2 个值分别是寄存器的值和立即数的值,所以在送入 ALU 模块操作数之前还需要添加一个 2 选 1 数据选择器,对立即数和寄存器值进行选择,故控制器还需要给出选择器的选择信号
这里需要牢记,如果一条指令不涉及内存相关的操作,必须要将内存写入使能信号清零,防止意外的向内存中写入非法数据。
经过这一系列的考量,一条 ADD 指令就要求控制器至少给出如下的信号:
- 寄存器写入使能信号(置位)
- ALU 运算操作信号(加法操作)
- ALU 数据选择信号(选寄存器值)
- 内存写入使能信号(清零)
I 型指令
I 型指令主要考虑 LOAD 相关指令(包括了 LB、LH、LW、LD 共 4 个不同宽度的内存读取操作):
LOAD 指令的功能是先计算 rs1 寄存器中的值与给出的立即数(即偏移量)之和,得到内存地址后从内存中读取对应的字节、半字、字、双字数据,并写入 rd 寄存器中。所以整个流程会涉及以下操作:
- 从寄存器堆中读取 rs1 寄存器的值
- 在 ALU 中完成偏移量相加的计算
- 根据地址从内存中读取数据
- 将读取的数据写入寄存器堆
则根据不同子模块的设计,可以推断出 LOAD 相关的指令,需要额外给出如下的信号:
- 寄存器写入使能信号(置位)
- ALU 运算操作信号(加法操作)
- ALU 数据选择信号(选立即数)
- 内存写入使能信号(置位)
对 S 型指令的分析与 I 型指令类似,最终需要的控制信号类型与 LOAD 相关指令相同。由于 LOAD 相关和 STORE 相关指令都有 4 种不同宽度的指令,所以各自需要 3 位控制信号(分别表示 4 种宽度和非内存读写指令)。
B 型指令与 J 型指令
对于这两类指令格式,其对应的指令分别是条件转移指令和无条件转移指令。所以可以一并考虑:转移指令的基本流程都是先计算出目标转移地址,再通知 PC 使其调整。故涉及以下操作:
- 从寄存器堆中读取寄存器的值(B 型指令比较值的大小,JALR 指令读取基址)
- 在 ALU 中计算转移目标地址或比较大小
- 通知 PC 更改下一条指令地址
- 向寄存器堆写入返回地址(JALR 指令操作)
同样的,可以推断出需要如下的控制信号:
- 寄存器写入使能(仅 JALR 时置位,其他情况下清零)
- PC 通知信号(B 型和 J 型指令需要做出区分)
- ALU 运算操作信号(加法操作、减法操作)
- ALU 数据选择信号(选择寄存器值)
- 内存写入使能信号(清零)
这里有一个技巧,由于 JAL 和 JALR 指令都需要记录下返回地址(即当前 PC + 4)至寄存器中,所以这里的加法运算可以不在庞大的 ALU 中完成,而改为放在数据通路中直接相加得到。此时,控制器就需要另行发出一个控制信号让写入寄存器的值,通过一个 2 选 1 数据选择器在 ALU 输出结果和 PC + 4 之间选择。
B 型指令中共有 4 种比较 rs1 寄存器值与 rs2 寄存器值大小的方式:
- 相等(BEQ)
- 不等(BNE)
- 小于(BLT)
- 大于等于(BGE)
所以 B 型指令还需要 3 位的控制信号(注意,此处还有不跳转的情况,共 5 种可能,至少 3 位信号进行选择)。
特殊控制信号
在讨论过上述基本控制信号之后,还需要关注一些特殊控制信号:
- 对于移位指令,根据手册描述,移位的数量为立即数的低 5 位,所以需要额外输出一个控制信号,要求立即数进入 ALU 前截取低 5 位
- 在 RV64I 指令集中,为了兼容 RV32I 的部分运算操作,在
opcode字段新增了 OP-IMM-32 这一表述,代表此 RV64I 指令不论运算结果如何,都需要首先将运算数截取低 32 位进行运算,之后再让运算结果符号扩展至 64 位后写入内存或寄存器。故此处即需要一个额外的控制信号,要求 ALU 截断输出的结果 - 对于 LUI 指令,其作用是将指令中的高 20 位置入 rd 寄存器中(在 RV64I 中是置入 reg[31:12]),其余位清零。所以,此处还需要一个控制信号,决定写入寄存器的值
- 对于 AUIPC 指令,和 LUI 指令类似,区别在于 AUIPC 要求将高 20 位数据后面拼接 12 位的 0,构成一个 32 位偏移量后加上当前 PC 值,最终的和写入 rd 寄存器中。故 AUIPC 需要一个额外的控制信号
至此,控制器模块的总体输入输出端口都已确定,可以得到如下的代码:
class Controller extends Component {
val io = new Bundle {
val instruction = in UInt (32 bits)
// ALU
val aluCtr = out UInt (4 bits) // 4 bits signal for ALU
val aluSrc = out Bool() // select data2 for ALU, True => from register, False => immediate
val shiftCtr = out Bool() // if instruction is shifting, then data2 should be lower 5 bits of immediate
val strip32 = out Bool() // for some RV64I instructions, requiring the result to be lower 32 bits
val exRes = out UInt (2 bits) // 2 bits signal to choose execution part result
// exRes => 00 -- ALU result 01 -- PC+4 10 -- LUI 11 -- AUIPC
// Register_file
val regWriteEnable = out Bool() // register write operation enable signal
// PC
val branch = out UInt (3 bits)
// branch => 000 -- DO NOT BRANCH 001 -- BEQ 010 -- BNE 011 -- BLT 100 -- BGE
val jump = out Bool()
val jalr = out Bool() // if JALR, then jump address is True => ALU result, else False => immediate
// Memory
val load = out UInt (3 bits) // load data from memory to register, 000 => write_data is ALU result, 001 => LB, 010 => LH, 011 => LW, 100 => LD
val store = out UInt (3 bits) // same as load
val memWriteEnable = out Bool() // memory write operation enable signal
// Register Index
val rs1 = out UInt (5 bits)
val rs2 = out UInt (5 bits)
val rd = out UInt (5 bits)
}
noIoPrefix()
}
控制器的具体实现
在总体设计结束后,就需要根据每条指令分别给不同的控制信号赋值,下面从各个 opcode 出发,对控制信号进行赋值。
- 首先需要确定各个控制信号的初始值,默认均清零:
default {
io.rs2 := 0
io.rs1 := 0
io.rd := 0
io.aluCtr := aluADD
io.aluSrc := False
io.shiftCtr := False
io.strip32 := False
io.exRes := aluRes
io.regWriteEnable := False
io.branch := noBranch
io.jump := False
io.jalr := False
io.load := noLoad
io.store := noStore
io.memWriteEnable := False
}
- LOAD 类型
正如上一小节所讨论,根据 funct3 字段确定宽度,需要注意的是清零内存写入使能。同时为了让代码更加可读,可以在 switch 选择语句之前定义好一系列的 val 常量:
val noLoad = U"000"
val LoadByte = U"001"
val LoadHalfWord = U"010"
val LoadWord = U"011"
val LoadDoubleWord = U"100"
这样在 is 语句中可以一定程度避免混淆信号值的问题出现:
is(U"00_000_11") {
// LOAD
// disable memory write enable signal
io.memWriteEnable := False
// disable branch & jump signal
io.jump := False
io.branch := noBranch
// ALU = ADD
io.aluSrc := False
io.aluCtr := aluADD
io.shiftCtr := False
io.exRes := aluRes
// Register, write memory data to rd
io.regWriteEnable := True
switch(funct3) {
is(U"000") {
// LB
io.load := LoadByte
}
is(U"001") {
// LH
io.load := LoadHalfWord
}
is(U"010") {
// LW
io.load := LoadWord
}
is(U"011") {
// LD
io.load := LoadDoubleWord
}
}
}
- STORE 类型
与 LOAD 类型类似,需要清零寄存器写入使能。同样首先定义常量部分:
val noStore = U"000"
val StoreByte = U"001"
val StoreHalfWord = U"010"
val StoreWord = U"011"
val StoreDoubleWord = U"100"
is 语句部分的可读性也可以增加:
is(U"01_000_11") {
// STORE
// disable register write enable signal
io.regWriteEnable := False
// disable branch & jump signal
io.jump := False
io.branch := noBranch
// ALU = ADD
io.aluSrc := False
io.shiftCtr := False
io.aluCtr := aluADD
io.exRes := aluRes
// Memory, write
io.memWriteEnable := True
switch(funct3) {
is(U"000") {
// SB
io.store := StoreByte
}
is(U"001") {
// SH
io.store := StoreHalfWord
}
is(U"010") {
// SW
io.store := StoreWord
}
is(U"011") {
// SD
io.store := StoreDoubleWord
}
}
}
- BRANCH 类型
注意,当指令没有写入操作时,必须要清零所有写入使能,定义常量如下:
val noBranch = U"000"
val BEQ = U"001"
val BNE = U"010"
val BGE = U"100"
val BLT = U"101"
控制信号变量赋值:
is(U"11_000_11") {
// BRANCH
// disable write enable signals
io.regWriteEnable := False
io.memWriteEnable := False
// branch
io.exRes := aluRes
// ALU
io.aluCtr := aluSUB
io.aluSrc := True
io.shiftCtr := False
switch(funct3) {
is(U"000") {
// BEQ
io.branch := BEQ
}
is(U"001") {
// BNE
io.branch := BNE
}
is(U"100") {
// BLT
io.branch := BLT
}
is(U"101") {
// BGE
io.branch := BGE
}
}
}
- JALR 类型
JALR 指令需要将返回地址(即当前 PC + 4)写入 rd 指定的寄存器中。由于此处引入了写入寄存器的新选择项,所以定义控制信号常量值如下:
val aluRes = U"00" // 写入 ALU 结果
val pc_plus_4 = U"01" // 写入 pc + 4
val LUI = U"10" // 写入 upper immediate
val AUIPC = U"11" // 写入 pc + upper immediate
JALR 指令类型控制信号赋值如下:
is(U"11_001_11") {
// JALR
// disable memory write enable signal
io.memWriteEnable := False
// Register, store pc+4 into rd
io.regWriteEnable := True
io.rs1 := rs1
io.rd := rd
io.aluSrc := True
io.aluCtr := aluADD
io.shiftCtr := False
// JALR
io.jump := True
io.branch := noBranch
io.exRes := pc_plus_4
io.load := noLoad
io.jalr := True
}
- JAL 类型
is(U"11_011_11") {
// JAL
// disable memory write enable signal
io.memWriteEnable := False
// Register, store pc+4 into rd
io.regWriteEnable := True
// JAL
io.jump := True
io.branch := noBranch
io.exRes := pc_plus_4
io.load := noLoad
io.jalr := False
}
- OP-IMM 类型
在 OP-IMM 类型指令中,还需要区分 funct3 和 funct7 字段值以确认 ALU 需要完成的运算。为了区分各 ALU 运算指令,使用常量对其命名:
val aluADD = U"0000"
val aluSLT = U"0001"
val aluSLTU = U"0010"
val aluAND = U"0011"
val aluOR = U"0100"
val aluXOR = U"0101"
val aluSLL = U"0110"
val aluSRL = U"0111"
val aluSUB = U"1000"
val aluSRA = U"1001"
则 OP-IMM 指令类型控制信号如下:
is(U"00_100_11") {
// OP-IMM
//write enable signal
io.memWriteEnable := False
io.regWriteEnable := True
// disable branch & jump signal
io.jump := False
io.branch := noBranch
// ALU data2 must be immediate
io.aluSrc := False
io.strip32 := False
io.exRes := aluRes
io.load := noLoad
io.shiftCtr := False
switch(funct3) {
is(U"000") {
// ADDI
io.aluCtr := aluADD
}
is(U"010") {
// SLTI
io.aluCtr := aluSLT
}
is(U"011") {
// SLTIU
io.aluCtr := aluSLTU
}
is(U"111") {
// ANDI
io.aluCtr := aluAND
}
is(U"110") {
// ORI
io.aluCtr := aluOR
}
is(U"100") {
// XORI
io.aluCtr := aluXOR
}
is(U"001") {
// SLLI
io.aluCtr := aluSLL
io.shiftCtr := True
}
is(U"101") {
// SRLI SRAI
io.shiftCtr := True
switch(funct7) {
is(U"0000000") {
// SRLI
io.aluCtr := aluSRL
}
is(U"0100000") {
// SRAI
io.aluCtr := aluSRA
}
}
}
}
}
- OP 类型
OP 类型和 OP-IMM 类型相似,依然是需要进一步区分 funct3 和 funct7:
is(U"01_100_11") {
// OP
//write enable signal
io.memWriteEnable := False
io.regWriteEnable := True
// disable branch & jump signal
io.jump := False
io.branch := noBranch
io.aluSrc := True
io.strip32 := False
io.exRes := aluRes
io.load := noLoad
io.shiftCtr := False
switch(funct3) {
is(U"000") {
// ADD SUB
switch(funct7) {
is(U"0000000") {
// ADD
io.aluCtr := aluADD
}
is(U"0100000") {
// SUB
io.aluCtr := aluSUB
}
}
}
is(U"010") {
// SLT
io.aluCtr := aluSLT
}
is(U"011") {
// SLTU
io.aluCtr := aluSLTU
}
is(U"111") {
// AND
io.aluCtr := aluAND
}
is(U"110") {
// OR
io.aluCtr := aluOR
}
is(U"100") {
// XOR
io.aluCtr := aluXOR
}
is(U"001") {
// SLL
io.aluCtr := aluSLL
io.shiftCtr := True
}
is(U"101") {
// SRL SRA
io.shiftCtr := True
switch(funct7) {
is(U"0000000") {
// SRL
io.aluCtr := aluSRL
}
is(U"0100000") {
// SRA
io.aluCtr := aluSRA
}
}
}
}
}
- OP-IMM-32 类型
和 OP 类型在除 ALU 外的主要模块控制信号相同,区别在于需要发出截取低 32 位的控制信号:
is(U"00_110_11") {
// OP-IMM-32
// write enable signal
io.memWriteEnable := False
io.regWriteEnable := True
// disable branch & jump signal
io.jump := False
io.branch := noBranch
io.aluSrc := False
io.strip32 := True
io.exRes := aluRes
io.load := noLoad
io.shiftCtr := False
switch(funct3) {
is(U"000") {
// ADDIW
io.aluCtr := aluADD
}
is(U"001") {
// SLLIW
io.aluCtr := aluSLL
io.shiftCtr := True
}
is(U"101") {
// SRLIW SRAIW
io.shiftCtr := True
switch(funct7) {
is(U"0000000") {
// SRLIW
io.aluCtr := aluSRL
}
is(U"0100000") {
// SRAIW
io.aluCtr := aluSRA
}
}
}
}
}
- OP-32 类型
同理,相较于 OP 类型,需要额外发出截取低 32 位的控制信号给 ALU:
is(U"01_110_11") {
// OP-32
// write enable signal
io.memWriteEnable := False
io.regWriteEnable := True
// disable branch & jump signal
io.jump := False
io.branch := noBranch
io.aluSrc := True
io.strip32 := True
io.exRes := aluRes
io.load := noLoad
io.shiftCtr := False
switch(funct3) {
is(U"000") {
// ADDW SUBW
switch(funct7) {
is(U"0000000") {
// ADDW
io.aluCtr := aluADD
}
is(U"0100000") {
// SUBW
io.aluCtr := aluSUB
}
}
}
is(U"001") {
// SLLW
io.aluCtr := aluSLL
io.shiftCtr := True
}
is(U"101") {
// SRLW SRAW
io.shiftCtr := True
switch(funct7) {
is(U"0000000") {
// SRLW
io.aluCtr := aluSRL
}
is(U"0100000") {
// SRAW
io.aluCtr := aluSRA
}
}
}
}
}
- LUI 和 AUIPC 类型
is(U"01_101_11") {
// LUI
// write enable signal
io.memWriteEnable := False
io.regWriteEnable := True
io.exRes := LUI
io.load := noLoad
}
is(U"00_101_11") {
// AUIPC
// write enable signal
io.memWriteEnable := False
io.regWriteEnable := True
io.exRes := AUIPC
io.load := noLoad
}
总结
至此,控制器模块设计完毕。但是,随着数据通路的搭建,也可能出现为了简化指令流程而需要额外控制信号的情况,那时将根据需求增添信号个数。
万变不离其宗的是,控制器作为译码环节最重要的模块,其设计思路一定是从指令的执行过程出发,思考指令流经的模块以及模块各自所需的输入,最后利用 switch 语句进行实现。本文也是以这样的思路从最简单的 ADD 指令开始,确定控制信号的个数,根据指令功能分析各信号值,最终在 SpinalHDL 框架下实现控制器。
参考资料
- CPU 设计实战 汪文祥 邢金璋 著 ISBN 978-7-111-67413-9
- SpinalHDL 手册
- SpinalHDL Getting Started
- RISC-V 非特权模式手册
猜你喜欢:
- 我要投稿:发表原创技术文章,收获福利、挚友与行业影响力
- 知识星球:独家 Linux 实战经验与技巧,订阅「Linux知识星球」
- 视频频道:泰晓学院,B 站,发布各类 Linux 视频课
- 开源小店:欢迎光临泰晓科技自营店,购物支持泰晓原创
- 技术交流:Linux 用户技术交流微信群,联系微信号:tinylab
| 支付宝打赏 ¥9.68元 | 微信打赏 ¥9.68元 | |
 |  请作者喝杯咖啡吧 |  |
Read Album:
- Stratovirt 的 RISC-V 虚拟化支持(六):PLIC 和 串口支持
- Stratovirt 的 RISC-V 虚拟化支持(五):BootLoader 和设备树
- Stratovirt 的 RISC-V 虚拟化支持(四):内存模型和 CPU 模型
- Stratovirt 的 RISC-V 虚拟化支持(三):KVM 模型
- Stratovirt 的 RISC-V 虚拟化支持(二):库的 RISC-V 适配
