

[置顶] 泰晓 RISC-V 实验箱,配套 30+ 讲嵌入式 Linux 系统开发公开课
RISC-V CPU 设计(2):RISC-V 特权指令架构
BossWangST 创作于 2023/07/18
Author: Fajie.WangNiXi YuHaoW1226@163.com Date: 2022/07/10 Revisor: Falcon, Jack.Y Project: RISC-V Linux 内核剖析 Proposal: RISC-V CPU Design Environment: Linux Lab Sponsor: PLCT Lab, ISCAS
RISC-V 的指令集架构 ISA 是由两大部分组成,分别是非特权级 ISA 和特权级 ISA。而正是因为特权级 ISA 的存在,才使得 RISC-V 可以在硬件层面(硬件线程)至多拥有 3 个不同的特权级模式,从而对不同的软件栈部件之间提供保护。
本文将介绍 RISC-V 的特权指令架构以及支撑 RISC-V 特权指令集的重要概念:CSR 寄存器。
RISC-V 特权软件栈术语
RISC-V 结构支持多种软件栈的实现方式,如下图所示:
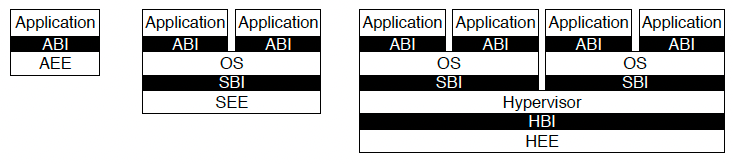
从图中可以看出,从左至右分别代表了 3 种软件栈的通用形式:
- 在图中最左部,展示了一个简单的系统结构:
- 单一的应用程序(Application)经由一个特定的应用程序(Application)二进制接口(ABI)编码,在一个应用程序执行环境(AEE)上运行。
- ABI 包含了其支持的用户级 ISA 以及与 AEE 进行交互的 ABI 调用(ABI calls)集合。在这样的结构中,AEE 的所有细节将对应用程序完全透明,从而使 AEE 的设计具备了更高的灵活性。
- 在图中正中央,展示了一个传统的,支持多个应用程序多道运行的系统结构:
- 系统中每一个应用程序都通过 ABI 与操作系统(OS)进行交互(此处 OS 提供了 AEE);同时和上一种结构中 ABI 与 AEE 的交互一样,RISC-V OS 需要通过一个 supervisor 二进制接口(SBI)来与管理员执行环境(SEE)交互。
- SBI 包含了用户级和 supervisor 级的 ISA 以及与 SEE 进行交互的 SBI 调用(SBI calls)。在所有的 SEE 实现中,使用单个的 SBI 则允许在任何一个 SEE 上运行单个的 OS 映像(image)。
- 在低端的硬件平台中,SEE 可以是一个简单的 boot loader 或是类似于 BIOS 的 IO 系统;而在高端的硬件平台中,SEE 则可以是一台提供了 hypervisor 的虚拟机,或者是一个模拟器系统(如 QEMU)中主机与模拟器之间的转换层。
- 在图中最右部,展示了一个虚拟机监视系统:
- 系统中一个单一的 hypervisor 支持了多个多道 OS。每一个 OS 都经由一个 SBI 与 hypervisor 通信(此处的 hypervisor 提供了 HEE),而 hypervisor 则是通过 hypervisor 二进制接口(HBI)与 hypervisor 执行环境 (HEE)进行交互,保证 HEE 对 hypervisor 透明。
而对于 RISC-V ISA 的硬件实现,通常需要除了特权指令集之外的其他一些特性,才能支持各种各样的执行环境(AEE、SEE、HEE 等)。
RISC-V 特权级
无论何时,一个 RISC-V 硬件线程(hart)总是会运行在某一个特权级,而这个信息则是通过编码记录在了多个 CSR 寄存器(control and status registers)中。本节将据此介绍 RISC-V 的特权级和特权模式。
根据最新的 RISC-V spec 规定,现在共有 3 个特权级,如下图所示:
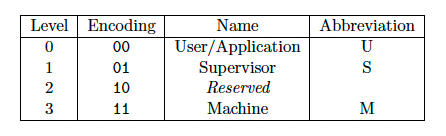
特权级的划分,是为了在不同软件栈部件之间提供安全机制,任何试图执行在某一特权级不被允许的操作,都将会产生一个异常;而这些异常通常会导致下层执行环境产生自陷(trap)。
在上面的描述中我们需要区分出特权级和特权模式的区别:
- 举例来说,一个特权级为 S 级的 OS 当然能够以 S 模式运行在一个支持 3 个特权模式的系统中;而如果一个系统只支持 2 个特权模式(如某些虚拟机系统),那么特权级为 S 级的 OS 也能够以 U 模式正常运行。
- 在上述两个例子中,虽然使用的是同样的 S 级 OS 代码,但是经由 SBI 的编码转换,OS 都将在系统中拥有 S 特权级应有的对应权限(可以执行 S 级特权指令或操纵部分 CSR);但是在第二个例子中,实际的系统并不存在 S 模式,所以当 OS 执行 S 级特权指令时,执行的操作就会自陷(trap)到拥有更高权限级别的 M 模式(下文会解释此原因)从而获取执行 S 级特权指令的权限,最终成功执行 S 级特权指令。
- 根据 RISC-V 官方手册,本文中的高特权级总是指代拥有更高权限的特权级,低特权级则指代拥有较低权限的特权级。具体划分如下(特权模式同理):
- 高特权级 ==> 低特权级
- M 特权级 => S 特权级 => U 特权级
在所有特权级别中,M 级总是拥有最高的权限,并且是 RISC-V 规定中唯一必须拥有的特权级。所以任何运行于 M 模式的代码都应当是固有可信的(inherently trusted),因为在 M 模式下的代码都可以直接访问到底层硬件实现。所以,在这里我们可以对 3 个模式的功能进行定义:
- M 模式是从 RISC-V 硬件层面进行管理,为上层模式提供一个安全的执行环境(EE)的特权模式
- S 模式是 OS 等系统应用所处于的特权模式
- U 模式是普通应用程序所处于的特权模式
在具体实现中,所有的 RISC-V 硬件都必须提供 M 模式,因为这是唯一可以不受限制访问整个硬件的模式。通过以上特权级的划分,RISC-V 的实现方式如图所示:

在一个实现全部 3 个模式的 RISC-V 系统中(这里的前提说明,在此系统中特权模式和特权级别一一对应),硬件线程(hart)通常是在 U 模式中执行普通应用而不会切换模式,只有通过某些方式(如系统调用或某些中断)触发了自陷(trap),hart 才会被强制切换至执行自陷处理函数(trap handler),由于自陷处理函数通常是在更高特权级别运行的函数代码,调用函数最终会使得 hart 的特权级别升高。在 RISC-V 设计中,能够提升特权等级的自陷称为垂直自陷(vertical trap),而保持原有特权级别的自陷则称为水平自陷(horizontal trap)。
下面对操作系统中的 3 个重要名词进行解释:异常(Exception)、中断(Interrupt)和自陷(Trap)的联系与区别
- 异常:用以指代硬件线程(hart)正常运行时,内部指令出现的异常情形
- 中断:用以指代硬件线程(hart)因出现了一个外部的异步事件而导致的意外的(此处的意外是指,对于一个正常运行的硬件线程 hart 来说,执行内部指令是正常行为,而外部事件则是意外行为)控制权转移
- 自陷:用以指代由异常或中断导致的,将系统控制权转移给自陷处理程序的行为
一句话总结:自陷是用来处理内部异常或外部中断的一种系统控制权转让的方法,其也会导致系统特权模式的改变。
RISC-V CSRs
CSR 是 Control and Status Register 的简称,顾名思义,这一类寄存器的作用就是用来记录系统当前控制和状态信息的寄存器;操作这些寄存器的指令,是在 RISC-V Zicsr 扩展模块中,手册规定,所有的 CSR 指令必须是原子性读写指令,即这些指令本身不可分割,属于原语。
CSR 与特权级密不可分,在描述中,通常是根据特权级来对每个 CSR 的功能进行阐释。但是请注意,虽然 CSR 和特权级所拥有的特权指令相关,但是特权级更高的指令仍然是可以向下访问特权级更低指令可访问的 CSR(如:M 特权级的指令允许访问 U 特权级可以访问的 instret 寄存器。instret 是 RISC-V 提供的 3 个硬件性能计数器之一,用于统计自 CPU 复位以来执行的指令数)。
CSR 的地址映射
标准 RISC-V ISA 设置了 12 位的编码空间(csr[11:0])预留给至多 4096 个 CSR。通常来说,CSR 寄存器地址的高 4 位(csr[11:8])是用来编码对 CSR 的读写指令,具体来说:
- csr[11:10]:设定 CSR 的读写权限
- 00、01、10:可读可写
- 11:只读
- csr[9:8]:设定能够访问此 CSR 的最低特权级
- 00:U 级
- 01:S 级
- 11:M 级
注:由于手册最新版已经没有定义 Hypervisor 级别,所以在这里若 csr[9:8] 取值为 10 则会自动落入 S 级。
下图中展示了 CSR 的地址传统分布:
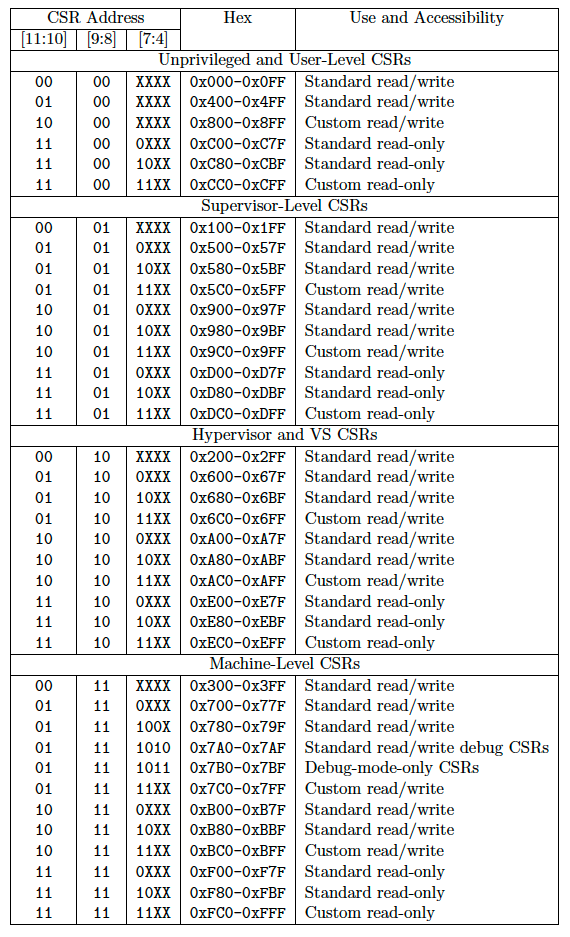
从图中可以看到,最低访问特权级为 M 级的 CSR 中,地址范围是 0x7A0~0x7BF 的 CSR 明确描述为 debug CSRs。这也就意味着,当且仅当系统处于调试模式时,才可以访问这些 CSR。那么这里就有必要介绍一下 RISC-V 的调试模式。同时,在 RISC-V 的实现中,还需要保证当低特权级想要访问高特权级对应的 CSR 时,系统能够抛出异常。
在 RISC-V 的具体实现中,通常会包含一个调试模式(Debug Mode)。调试模式支持 off-chip 调试 和 手动测试,在调试模式(又称为 D 模式)中,模式本身可认为是一个额外的特权模式,但更为底层;D 模式为了调试的目标,会将完全的硬件资源暴露出来,所以 D 模式对于系统的访问范围甚至比 M 模式要更高,故对于调试模式的细节,大家可以参照调试模式规范。同时 D 模式会保留一些 CSR 的地址(0x7A0~0x7BF),专门用于调试时使用。
CSR 的字段访问权限
本节将从 CSR 寄存器中存储的信息字段角度,介绍 CSR 不同的读写访问权限。
WPRI(Reserved Writes Preserve Values, Read Ignore Values) 在 CSR 中,某些读/写字段是为未来发展而保留的,所以系统中的软件应当忽略从这些字段中读取的值(即 Read Ignore Values),并且在向 CSR 其他字段写入数据的时候,还需要保护这些预留字段,维持字段中的值不变(即 Reserved Writes Preserve Values)。为了将来的扩展需要,如果某一个 RISC-V 系统中实现了包含 WPRI 字段的 CSR 读写功能,则必须保持 WPRI 字段只读且为 0 ,所以在 RISC-V 规范有关 CSR 的描述中,这些字段被标识为 WPRI。
WLRL(Write/Read Only Legal Values) 在某些 CSR 的读写字段中,只允许存在某一类合法编码,而其他编码则判定为非法。所以系统中的软件只可以向此字段中写入字段所规定的合法数据(即 Write Only Legal Values),同时若从此字段中读取,则软件也只会读取到合法编码集合中的某一个编码(即 Read Only Legal Values)。这些 CSR 的字段被标识为 WLRL。
这里需要补充说明一下,如果向 WLRL 字段写入了非法数据会怎么样? 在 RISC-V 的规范中,并没有对此作出强制规定,即当有操作向 WLRL 字段中写入了非法数据时,由系统的实现者去决定要不要抛出异常。同样,当写入非法数据后,对字段(当前是非法数据)的读取操作也没有规定必须抛出异常,这完全由系统实现者决定。
WARL(Write Any Values, Read Legal Values) 和 WLRL 权限类似,某些 CSR 中的字段定义了一类合法的编码,和 WLRL 不同的是,其允许非法数据进行写入;但是 RISC-V 规范明确规定,对此字段的读取必须返回合法的编码。所以这一字段可以用来测试 CSR 的合法编码集合,假设对某一 CSR 的写入没有任何副作用,那么我们可以向其中写入任何编码,这之后再读取这一字段,如果读取的值和写入的数据相同,则可以判定此数据属于合法编码集合。这些 CSR 的字段被标识为 WARL。对于非法数据的处理,WARL 字段的处理和 WLRL 相同,已在上文叙述。
CSR 的指令格式
在 CPU 的设计中,我们必须了解指令的格式,才可以编写译码模块,本节将从 CSR 的指令格式角度进行介绍。
正如上文所介绍的,所有的 CSR 指令必须是原子性读写指令,且每一条 CSR 指令只允许操作单个 CSR,下图中展示了一条通用的 CSR 指令格式:
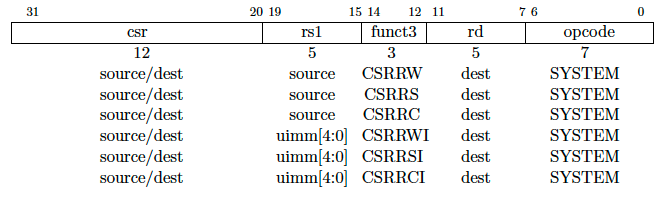
从图中可以得到以下结论:
- inst[31:20]:指定需要操作的 CSR,内容为 12 位的地址(CSR 的地址映射已在上文进行说明)
- inst[19:15]:指定使用的第一个寄存器,对于立即数版本的指令,则是将零扩展 5 位的立即数编码后填入 rs1 的字段
- inst[14:12]:指定具体的 CSR 指令类型
- inst[6:0]:固定为 SYSTEM 的操作码,即
1110011
下面对 3 个原子指令(立即数版本的同理)逐一进行分析:
- CSRRW(Atomic Read/Write CSR):交换 CSR 和整数寄存器中的值,先读取 CSR 值,零扩展后送入寄存器 rd,并将 rs1 的值送入 CSR;若 rd 为 x0,则指令将不允许读取 CSR,但可以正常写入 CSR
- CSRRS(Atomic Read and Set Bits in CSR):读取 CSR 的值,零扩展后送入寄存器 rd,而 rs1 的值则翻译为掩码,对 CSR 进行置位(rs1 中 1 的位置会将 CSR 对应位置位,0 的位置则 CSR 对应位保持不变)
- CSRRC(Atomic Read and Clear Bits in CSR):读取 CSR 的值,零扩展后送入寄存器 rd,而 rs1 的值则翻译为掩码,对 CSR 进行清零(rs1 中 1 的位置会将 CSR 对应位清零,0 的位置则 CSR 对应位保持不变)
下图中介绍了 CSR 指令的相关读写限制:
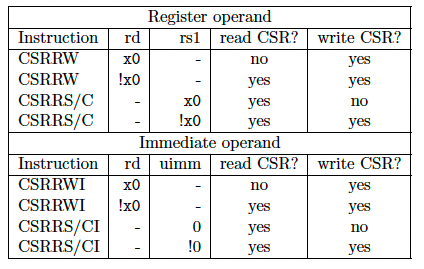
图中明确指出了,当对应指令字段的寄存器是 x0 或不是 x0 时,指令中 CSR 寄存器的读写权限。利用读写权限的不同,汇编器就可以对 CSR 寄存器进行读取,如:
CSRRS rd, csr, x0 # read csr
CSRRW x0, csr, rs1 # write csr with rs1
CSRWI x0, csr, uimm # write csr with immediate
典型 CSR 案例
在介绍完 CSR 的地址映射及指令格式后,本节将用 2 个典型的 CSR 案例来进一步阐释上文的理论。
状态寄存器(mstatus/sstatus)
状态寄存器(Status Register)分为两种,mstatus 对应 M 模式,sstatus 对应 S 模式;此 CSR 的作用在于记录并控制当前 CPU 的运行状态。
根据地址映射规则,mstatus 的地址为 0x300 ,而 sstatus 的地址为 0x100 ,下面用图表的形式分别讲解 mstatus 和 sstatus 的内容格式:
mstatus:

sstatus:

- 从图片中我们可以得到以下结论:
在 RV64 指令集中,CSR 的宽度和 32 个通用寄存器一样是 64 位
不同的字段会明确用不同的标识来说明字段本身的读写访问权限
字段中每一位都赋予了不同的含义,目的是使得应用程序可以通过读写 CSR 来获取、改变当前 CPU 的状态;这里对常用字段简略介绍:
mstatus[12:11]:MPP(Machine Previous Privilege),通常是出现一个切换到 M 模式的自陷时自动设定,表示切换到 M 模式之前的模式;模式的编码如下:Machine Mode=>11Supervisor Mode=>01User Mode=>00status[8]:SPP(Supervisor Previous Privilege),表示切换到 S 模式之前的模式,模式的编码为:Supervisor Mode=>1User Mode=>0mstatus[3],status[1]:分别是 MIE(Machine Interrupt Enable)和 SIE(Supervisor Interrupt Enable),表示 M 模式和 S 模式下的中断使能,当字段置位时表明为 M 模式或 S 模式的开中断状态,清零时则是关中断状态mstatus[37],mstatus[36]mstatus[6]:分别是 MBE、SBE 和 UBE,其中 BE 表示 Byte Endianness 即字节的大小端方式;RISC-V 的指令读写强制为小端编码,但是内存的编码方式则由 BE 字段管理。MBE、SBE 和 UBE 分别表示 M 模式、S 模式和 U 模式下的内存编码方式,当字段置位时表示大端编码方式,清零时则是小端编码方式。
自陷向量基址寄存器(mtvec/stvec)
自陷向量寄存器(Trap-vector Base-address Register)分为两种,mtvec 对应 M 模式,stvec 对应 S 模式;此 CSR 的作用在于配置自陷向量。
根据地址映射规则,mtvec 的地址为 0x303,而 stvec 的地址为 0x105,下面用图表的形式展示 CSR:
mtvec/stvec

- 图中寄存器内容分为两部分,
BASE和MODEBASE记录的是自陷发生时(不论是中断还是异常),自陷处理函数所需要跳转的地址(基址)MODE可以在BASE的基础上加入地址对齐的约束条件,具体来说:- 当
MODE为 0 时,PC 寄存器中下一条指令的地址直接使用BASE字段中的值 - 当
MODE为 1 时,PC 寄存器中下一条指令的地址为BASE + 4 * cause,这里的cause可以从导致自陷发生的寄存器中直接获得
- 当
异常程序计数寄存器(mepc/sepc)
异常程序计数寄存器(Exception Program Counter Register)分为两种,mepc 对应 M 模式,sepc 对应 S 模式;此 CSR 的作用在于记录触发异常的指令逻辑地址,以便系统处理异常结束后,pc 寄存器可以返回到原先程序的指令地址继续执行。
根据地址映射规则,mepc 的地址为 0x341,而 sepc 的地址为 0x141,下面用图表的形式展示 CSR:
mepc

- 当异常触发时,系统会自动记录此时执行的指令地址并装入
mepc寄存器
异常处理寄存器(medeleg)
在默认情况下,任何特权级的异常都会在 M 模式下进行处理;而为了提升 CPU 的处理性能,机器级异常处理寄存器(Machine Exception Delegation Registers)中记录的异常可以交由更低级别的特权模式(如 S 模式甚至于 U 模式)进行处理。
注意,当且仅当系统提供 S 模式时,medeleg 寄存器才可以存在;且自陷永远不会从更高特权级的模式(如最高特权级的 M 模式)转移至更低特权级的模式(如 S 模式)进行处理。根据地址映射规则,medeleg 的地址为 0x302,下面用图表的形式展示 CSR:
medeleg

- 当异常交由 S 模式处理时,
scause寄存器(下文将介绍)会记录自陷原因;sepc寄存器会记录触发异常的指令逻辑地址;mstatus寄存器的 SPP 字段会记录自陷发生时的特权模式,同时将 SIE 字段清零表示 S 模式的关中断状态;而此时mcause、mepc以及mstatus中的 MPP、MIE 字段将保持不变。 medeleg寄存器的每一位都可以对应一类异常进行处理,其编码如图所示:
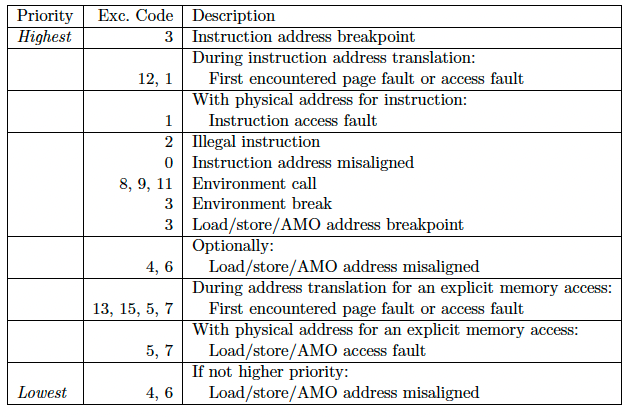
当异常编码值所对应的 medeleg 位为 1 时,此类异常就可交由更低级的特权模式进行处理。如将 mdeleg[8] 置位时,表示 Environment call 类异常可交由更低级的特权模式处理(在下面的综合实例中就可以看到这样的应用)。
自陷原因寄存器(mcause)
Machine Cause Register 为机器级自陷原因寄存器。顾名思义,当出现切换至 M 模式的自陷时,此 CSR 会记录导致自陷的事件编号,编号含义如下图所示:
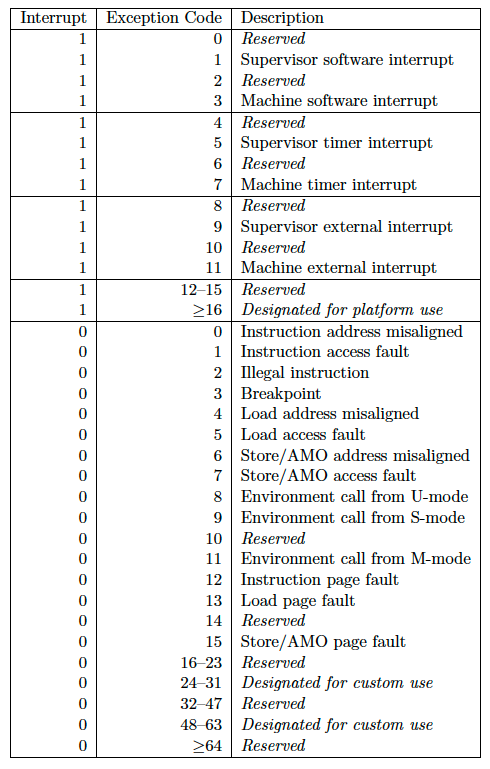
根据地址映射规则,mcause 的地址为 0x342,下面用图表的形式展示此 CSR:
mcause

- 图表中最高位的 Interrupt 字段置位时表示触发自陷的是中断事件,清零时表示触发自陷的是异常事件
- Exception Code 字段记录的是触发自陷的事件编号
RISC-V 特权模式与 CSR 综合实例
本节将使用 Linux Lab 实验环境,结合 QEMU 模拟器与跨架构版 GDB 调试器,编写一段简单的汇编语言程序,展示 RISC-V 特权模式的切换与 CSR 记录的值。
RISC-V 系统中,一个硬件线程(hart)总是从 M 模式开始运行,我们首先编写一段简单的 RISC-V 汇编程序 entry.S:
.section .text
.globl start
start:
la t0, supervisor
csrw mepc, t0
la t1, m_trap
csrw mtvec, t1
li t2, 0x1800
csrc mstatus, t2
li t3, 0x800
csrs mstatus, t3
li t4, 0x100
csrs medeleg, t4
mret
m_trap:
csrr t0, mepc
csrr t1, mcause
la t2, supervisor
csrw mepc, t2
mret
supervisor:
la t0, user
csrw sepc, t0
la t1, s_trap
csrw stvec, t1
sret
s_trap:
csrr t0, sepc
csrr t1, scause
ecall
user:
csrr t0, instret # 这里仅为了展示在 U 模式下可以访问的为数不多的 CSR,表示当前硬件线程已执行指令的条数
ecall
由于我们即将使用 QEMU 模拟器对这一 RISC-V 硬件线程进行模拟,而此时系统中并没有运行一个 OS,所以我们必须编写一个简单的链接器脚本用以指明上面的代码位于内存中的地址,编写的脚本名为 virt.ld:
SECTIONS
{
. = 0x80000000;
.text : { *(.text) }
}
virt.ld 脚本各字段的含义如下:
. = 0x80000000:可执行的代码内存地址为0x80000000.text : { *(.text) }:将汇编中的 text 节代码直接关联到运行时系统的 text 节进行执行- 脚本的作用是:运行
entry.S程序时,起始地址为0x80000000,以.start为程序起始点(ld脚本在没有特殊指定情况下,默认以start为起始点)
下面,我们可以直接使用 Linux Lab 中预编译好的 gcc 交叉编译工具链对 entry.S 进行汇编和链接,所用命令如下:
riscv64-linux-gnu-as entry.S -o entry.o
riscv64-linux-gnu-ld -T virt.ld entry.o -o entry
现在,我们就可以使用 QEMU 模拟器开始模拟这一简单的演示程序了:
ubuntu@linux-lab:/labs/linux-lab/src/examples/privillege$ qemu-system-riscv64 -smp 1 -s -S -nographic -bios none -kernel entry
这段命令的参数含义是:
-smp 1:使用 1 个硬件线程运行-s:是-gdb tcp::1234的简写,表示启用了 gdb 调试模式,且本地端口为 1234-S:在程序执行前必须等待 gdb 的指令-nographic:禁用图形接口-bios none和-kernel entry:表示硬件线程只执行单一的程序entry,不启用 OpenSBI
由于使用了 -S 选项,程序必须等待 gdb 输入命令后才能继续执行,这很有助于我们进行调试;下面使用 gdb 连接本地的 1234 端口,就可以开始对 QEMU 模拟的系统进行调试了:
ubuntu@linux-lab:/labs/linux-lab/src/examples/privillege$ gdb-multiarch entry -ex "target remote :1234"
Reading symbols from entry...
(No debugging symbols found in entry)
Remote debugging using :1234
0x0000000000001000 in ?? ()
(gdb)
为了调试中更清晰的看到各个重要寄存器以及特权模式的切换,我们接下来需要在 gdb 中加入断点并要求显示寄存器:
(gdb) display /i $pc
1: x/i $pc
=> 0x1000: auipc t0,0x0
(gdb) display /x $mstatus
2: /x $mstatus = 0x0
(gdb) display /x $mepc
3: /x $mepc = 0x0
(gdb) display /x $sstatus
4: /x $sstatus = 0x0
(gdb) display /x $sepc
5: /x $sepc = 0x0
(gdb) b *start
Breakpoint 1 at 0x80000000
(gdb) b *m_trap
Breakpoint 2 at 0x8000003c
(gdb) Kb *supervisor
Breakpoint 3 at 0x80000054
(gdb) b *s_trap
Breakpoint 4 at 0x80000070
(gdb) b *user
Breakpoint 5 at 0x8000007c
(gdb) c
Continuing.
Breakpoint 1, 0x0000000080000000 in start ()
1: x/i $pc
=> 0x80000000 <start>: auipc t0,0x0
2: /x $mstatus = 0x0
3: /x $mepc = 0x0
4: /x $sstatus = 0x0
5: /x $sepc = 0x0
在做好调试准备后,我们就可以正式开始调试了,因为本质上 -S 的选项相当于在 0x0 地址处打了一个断点,我们可以直接使用 c,让程序继续运行。从程序日志中可以看到,我们成功的让程序停在了 start 标签所对应的断点处,并且可以清楚地确认各寄存器中的值(CSR 均初始化为 0)。
接下来介绍为什么 gdb 中第一条指令不是 entry.S 中的 la t0, supervisor:事实上,加载地址指令(la)是一条伪指令,其作用是将一个指定的符号(如 start supervisor 等)加载到 GPR 中,这条指令允许我们使用一个符号名来代指符号的地址,从而避免了使用两条指令 auipc 和 addi 来将一个宽地址加载进入寄存器。如果我们使用 gdb 查看指令,就能发现汇编器已经自动将 la 转换成了两条指令:
Breakpoint 1, 0x0000000080000000 in start ()
1: x/i $pc
=> 0x80000000 <start>: auipc t0,0x0
2: /x $mstatus = 0x0
3: /x $mepc = 0x0
4: /x $sstatus = 0x0
5: /x $sepc = 0x0
(gdb) x/2i $pc
=> 0x80000000 <start>: auipc t0,0x0
0x80000004 <start+4>: addi t0,t0,84
我们接着单步执行到 csrw 指令处:
(gdb) si 2
0x0000000080000008 in start ()
1: x/i $pc
=> 0x80000008 <start+8>: csrw mepc,t0
2: /x $mstatus = 0x0
3: /x $mepc = 0x0
4: /x $sstatus = 0x0
5: /x $sepc = 0x0
(gdb) p /x $t0
$1 = 0x80000054
可以看到,此时的 t0 寄存器中已经存放了 supervisor 节的地址,而 csrw 指令会将此地址写入 mepc 寄存器(Machine Exception Program Counter)中;正如上文所介绍的,此处填写的地址表示系统处理异常结束后返回的地址,所以为了演示模式切换,这里填入了 S 模式下的指令地址:
(gdb) si
0x000000008000000c in start ()
1: x/i $pc
=> 0x8000000c <start+12>: auipc t1,0x0
2: /x $mstatus = 0x0
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x0
单步执行后,mepc 寄存器成功装入了地址;下面同样的,我们使用两行汇编代码将 m_trap 节的地址装入 mtvec 寄存器(Machine Trap Vector)中:
la t1, m_trap
csrw mtvec, t1
这一 CSR 的作用是指明当一个自陷(trap)发生时,处理器应该去执行指令的地址(即自陷处理函数的地址)。在 OS 中,这些自陷处理函数往往是一系列 S 模式中的系统调用;继续单步执行指令,可以看到 m_trap 的地址正确的装入了 mtvec 寄存器中:
(gdb) p m_trap
$2 = {<text variable, no debug info>} 0x8000003c <m_trap>
(gdb) si 3
0x0000000080000018 in start ()
1: x/i $pc
=> 0x80000018 <start+24>: lui t2,0x2
2: /x $mstatus = 0x0
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x0
(gdb) p /x $mtvec
$3 = 0x8000003c
下面的操作略微复杂,我们又一次的使用了 li 指令来直接加载一个宽立即数(即大于 12 位的立即数)0x1800 ,在这里实质上是需要将 mstatus 的 MPP 字段修改为 S 模式的编码(01),汇编代码截取如下:
li t2, 0x1800
csrc mstatus, t2
li t3, 0x800
csrs mstatus, t3
由于我们一开始就在 M 模式,所以并未对 mstatus 寄存器修改,但是为了让 mret 指令执行后 mstatus 能够正确的表示系统当前特权模式(此处为 S 模式),我们必须手动写入 mstatus 寄存器;在这里,为了保证 mstatus 寄存器的其他字段不受干扰,我们必须利用位运算中的掩码(使用 csrc 和 csrs 实现),只修改 MPP 字段而保持其他位数不变:
(gdb) si 3
0x0000000080000018 in start ()
1: x/i $pc
=> 0x80000018 <start+24>: lui t2,0x2
2: /x $mstatus = 0x0
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x0
(gdb) p /x $mtvec
$3 = 0x8000003c
(gdb) si 5
0x000000008000002c in start ()
1: x/i $pc
=> 0x8000002c <start+44>: csrs mstatus,t3
2: /x $mstatus = 0x0
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x0
(gdb) si
0x0000000080000030 in start ()
1: x/i $pc
=> 0x80000030 <start+48>: li t4,256
2: /x $mstatus = 0x800
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x0
在真正的切换到 S 模式前,我们还需要调整一下 medeleg 寄存器(Machine Trap Delegation),使得部分自陷交由更低级别的特权模式处理,这里将 medeleg 寄存器的第 8 位置位,表示让 S 模式处理 Environment Call 类的异常,而 entry.S 程序中 U 模式下调用的 ecall 函数正是会触发属于此类异常的函数,所以可以从 U 模式通过异常切换到 S 模式,汇编代码截取如下:
user:
csrr t0, instret
ecall
从调试输出也可以看到成功将 medeleg 寄存器的第 8 位置位:
(gdb) si 2
0x0000000080000038 in start ()
1: x/i $pc
=> 0x80000038 <start+56>: mret
2: /x $mstatus = 0x800
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x0
(gdb) p /x $medeleg
$4 = 0x100
(gdb) si
至此,所有的准备工作都已就绪,现在终于可以利用异常来切换到 S 模式了:
(gdb) si
Breakpoint 3, 0x0000000080000054 in supervisor ()
1: x/i $pc
=> 0x80000054 <supervisor>: auipc t0,0x0
2: /x $mstatus = 0x80
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x0
接下来,程序将一直进行模式切换(死循环),我们可以用 c 来让程序继续运行,过程中会不断的利用 ecall 触发 s_trap 从而进入 S 模式,再碰到 m_trap 进入 M 模式,并且能从 mstatus 寄存器明显的看出模式切换:
(gdb) c
Continuing.
Breakpoint 5, 0x000000008000007c in user ()
1: x/i $pc
=> 0x8000007c <user>: rdinstret t0
2: /x $mstatus = 0xa0
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x20
5: /x $sepc = 0x8000007c
(gdb) c
Continuing.
Breakpoint 4, 0x0000000080000070 in s_trap ()
1: x/i $pc
=> 0x80000070 <s_trap>: csrr t0,sepc
2: /x $mstatus = 0x80
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x80000080
(gdb) c
Continuing.
Breakpoint 2, 0x000000008000003c in m_trap ()
1: x/i $pc
=> 0x8000003c <m_trap>: csrr t0,mepc
2: /x $mstatus = 0x800
3: /x $mepc = 0x80000078
4: /x $sstatus = 0x0
5: /x $sepc = 0x80000080
(gdb) c
Continuing.
Breakpoint 3, 0x0000000080000054 in supervisor ()
1: x/i $pc
=> 0x80000054 <supervisor>: auipc t0,0x0
2: /x $mstatus = 0x80
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x80000080
(gdb) c
Continuing.
Breakpoint 5, 0x000000008000007c in user ()
1: x/i $pc
=> 0x8000007c <user>: rdinstret t0
2: /x $mstatus = 0xa0
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x20
5: /x $sepc = 0x8000007c
(gdb) c
Continuing.
Breakpoint 4, 0x0000000080000070 in s_trap ()
1: x/i $pc
=> 0x80000070 <s_trap>: csrr t0,sepc
2: /x $mstatus = 0x80
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x80000080
(gdb) c
Continuing.
Breakpoint 2, 0x000000008000003c in m_trap ()
1: x/i $pc
=> 0x8000003c <m_trap>: csrr t0,mepc
2: /x $mstatus = 0x800
3: /x $mepc = 0x80000078
4: /x $sstatus = 0x0
5: /x $sepc = 0x80000080
(gdb) c
Continuing.
Breakpoint 3, 0x0000000080000054 in supervisor ()
1: x/i $pc
=> 0x80000054 <supervisor>: auipc t0,0x0
2: /x $mstatus = 0x80
3: /x $mepc = 0x80000054
4: /x $sstatus = 0x0
5: /x $sepc = 0x80000080
从这个简单的案例中,我们可以实实在在的看到 RISC-V 系统中特权模式的切换以及 CSR 在其中起到的重要支撑作用。
总结
本文首先介绍了 RISC-V 特权指令集中特权等级和特权模式的划分,并阐述了等级和模式的异同以及模式切换的方法;在后半段文章也详细介绍了 RISC-V 中 CSR 的相关知识。
系列文章预告:CPU 设计中的数字逻辑电路知识以及新型的硬件设计语言:泛 Scala 语言体系下的 SpinalHDL 介绍。
参考资料
- RISC-V Privileged Spec
- RISC-V Unprivileged Spec
- RISC-V Unprivileged Spec
- RISC-V 中文特权指令手册
- RISC-V Debug Spec
- Writing a RISC-V Emulator in Rust
本文部分图片来自参考资料(Wiki 和 RISC-V 手册等),感谢原作者的辛苦工作!
猜你喜欢:
- 我要投稿:发表原创技术文章,收获福利、挚友与行业影响力
- 知识星球:独家 Linux 实战经验与技巧,订阅「Linux知识星球」
- 视频频道:泰晓学院,B 站,发布各类 Linux 视频课
- 开源小店:欢迎光临泰晓科技自营店,购物支持泰晓原创
- 技术交流:Linux 用户技术交流微信群,联系微信号:tinylab
| 支付宝打赏 ¥9.68元 | 微信打赏 ¥9.68元 | |
 |  请作者喝杯咖啡吧 |  |
Read Album:
- Stratovirt 的 RISC-V 虚拟化支持(六):PLIC 和 串口支持
- Stratovirt 的 RISC-V 虚拟化支持(五):BootLoader 和设备树
- Stratovirt 的 RISC-V 虚拟化支持(四):内存模型和 CPU 模型
- Stratovirt 的 RISC-V 虚拟化支持(三):KVM 模型
- Stratovirt 的 RISC-V 虚拟化支持(二):库的 RISC-V 适配
